Math basic of 3D Reconstruction
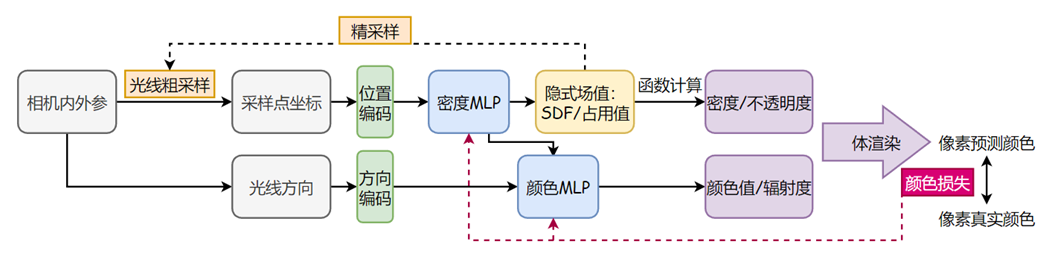
Framework
- 相机内外惨:连接像素坐标系与空间坐标系之间的计算
- 隐式implicit场:通过一个隐式表示的函数表示物体/场景,使用MLP来学习空间的隐式函数
- 密度场,表示该空间点的密度
- SDF $sdf=F(x,y,z)=0$,表示该空间点离物体表面的最近距离
- 编码:由于直接使用输入坐标xyz,网络无法很好地学习低频特征,需要将其进行高频编码
- 空间点采样:逆变换采样CDF
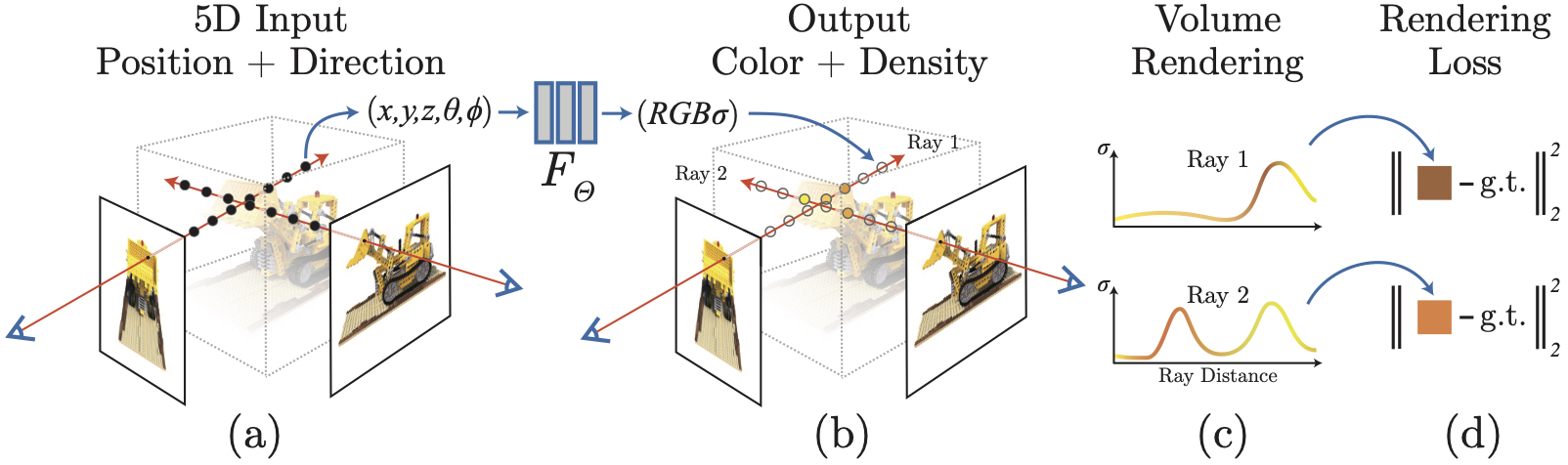
- 体渲染:将沿着光线空间采样点的颜色和密度积分为像素颜色
体渲染函数
Ray: $\mathbf{r} = \mathbf{o} +t\mathbf{d}$
密度场:(NeRF)
$\mathrm{C}(r)=\int_{\mathrm{t}_{\mathrm{n}}}^{\mathrm{t}_{\mathrm{f}}} \mathrm{T}(\mathrm{t}) \sigma(\mathrm{r}(\mathrm{t})) \mathrm{c}(\mathrm{r}(\mathrm{t}), \mathrm{d}) \mathrm{dt}$
- $\mathrm{T}(\mathrm{t})=\exp \left(-\int_{\mathrm{t}_{\mathrm{n}}}^{\mathrm{t}} \sigma(\mathrm{r}(\mathrm{s})) \mathrm{ds}\right)$
- 累计透射率$T(t)$可以保证离相机位置近的地方有更大的权重(一条光线前面的点遮挡后面的点)
离散化:$\hat{C}(\mathbf{r})=\sum_{i=1}^{N} T_{i}\alpha_{i}\mathbf{c}_{i}=\sum_{i=1}^{N} T_{i}\left(1-\exp \left(-\sigma_{i} \delta_{i}\right)\right) \mathbf{c}_{i}$ - $T_{i}=\exp \left(-\sum_{j=1}^{i-1} \sigma_{j} \delta_{j}\right)=\prod_{j=1}^{i-1}(1-\alpha_j)$
符号距离函数SDF:(NeuS)
$C(\mathbf{o},\mathbf{v})=\int_{0}^{+\infty}w(t)c(\mathbf{p}(t),\mathbf{d})\mathrm{d}t$
- $\omega(t)=T(t)\rho(t),\text{where}T(t)=\exp\left(-\int_0^t\rho(u)\mathrm{d}u\right)$
- $\rho(t)=\max\left(\frac{-\frac{\mathrm{d}\Phi_s}{\mathrm{d}t}(f(\mathbf{p}(t)))}{\Phi_s(f(\mathbf{p}(t)))},0\right)$
离散化:$\hat{C}=\sum_{i=1}^n T_i\alpha_i c_i$ - $T_i=\prod_{j=1}^{i-1}(1-\alpha_j)$
- $\alpha_i=\max\left(\frac{\Phi_s(f(\mathbf{p}(t_i))))-\Phi_s(f(\mathbf{p}(t_{i+1})))}{\Phi_s(f(\mathbf{p}(t_i)))},0\right)$
坐标变换
【相机标定】相机标定原理 - welcome to x-jeff blog 相机内外参+径切向畸变
矩阵的QR分解
QR分解可以将任何实数方阵分解成一个正交矩阵Q与一个上三角矩阵R的积
$A=QR$
1 | # This function is borrowed from IDR: https://github.com/lioryariv/idr |
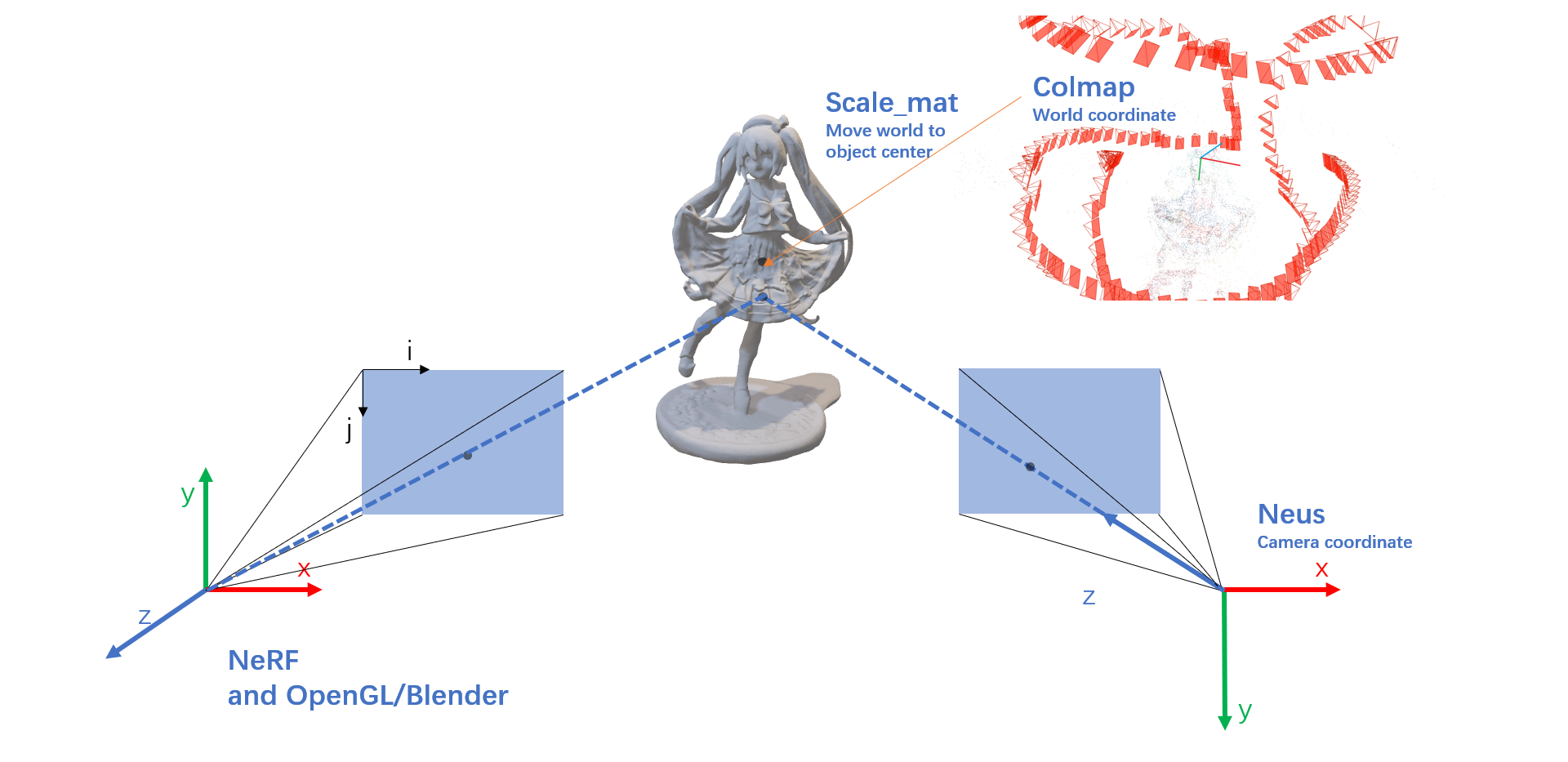
- world_mat 为 w2p矩阵
- scale_mat 为 ws2w矩阵,其中ws是单位box坐标系,坐标原点在box中心
- intrinsics 为相机内参矩阵,camera to pixel
- pose 为逆相机外参矩阵, camera to world (scaled)
三个坐标系:像素Pixel | 相机Camera | 世界World
相机内参矩阵intrinsic(c2p)
理解与NeRF OpenCV OpenGL COLMAP DeepVoxels坐标系朝向_nerf坐标系_培之的博客-CSDN博客一致
不同软件的相机坐标朝向不同
- NeRF采用与 OPENGL 和 Blender相同的朝向
- NeuS采用与 COLMAP 相同的朝向
p2c 像素坐标到相机坐标:
$\mathbf{p_c}=\begin{bmatrix}\dfrac{1}{f}&0&-\dfrac{W}{2\cdot f}\\0&\dfrac{1}{f}&-\dfrac{H}{2\cdot f}\\0&0&1\end{bmatrix}\begin{pmatrix}i\\j\\1\end{pmatrix}=\begin{pmatrix}\dfrac{i-\dfrac{W}{2}}{f}\\\dfrac{j-\dfrac{H}{2}}{f}\\1\end{pmatrix}$
| Method | Pixel <—> Camera coordinate |
|---|---|
| NeRF | $\vec d = \begin{pmatrix} \frac{i-\frac{W}{2}}{f} \\ -\frac{j-\frac{H}{2}}{f} \\ -1 \\ \end{pmatrix}$ , $intrinsics = K = \begin{bmatrix} f & 0 & \frac{W}{2} \\ 0 & f & \frac{H}{2} \\ 0 & 0 & 1 \\ \end{bmatrix}$ |
| Neus | $\vec d = intrinsics^{-1} \times pixel = \begin{bmatrix} \frac{1}{f} & 0 & -\frac{W}{2 \cdot f} \\ 0 & \frac{1}{f} & -\frac{H}{2 \cdot f} \\ 0 & 0 & 1 \\ \end{bmatrix} \begin{pmatrix} i \\ j \\ 1 \\ \end{pmatrix} = \begin{pmatrix} \frac{i-\frac{W}{2}}{f} \\ \frac{j-\frac{H}{2}}{f} \\ 1 \\ \end{pmatrix}$ |
可以在pixel求camera坐标时直接求反yz轴的朝向,directions = torch.stack([(i - cx) / fx, -(j - cy) / fy, -torch.ones_like(i)], -1) # (H, W, 3),或者也可在c2w矩阵中直接修改,第一列和第三列求反,c2w_[:3,1:3] *= -1. # flip input sign
由于NeuS使用的DTU数据集/自制数据集是与COLMAP相同的相机朝向,因此不用进行变换。
相机外参矩阵pose(c2w)
colmap处理得到的/colmap/sparse/0中文件cameras, images, points3D.bin or .txt
其中images.bin中:
1 | # IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME |
由四元数得到旋转和位移矩阵
1 | R = | 1 - 2*(qy^2 + qz^2) 2*(qx*qy - qw*qz) 2*(qx*qz + qw*qy) | |
横向catR和t得到:w2c = [R, t]
$c2w = \left[\begin{array}{c|c}\mathbf{R}_{c}&\mathbf{C}\\\hline\mathbf{0}&1\\\end{array}\right]$
c2w矩阵的值直接描述了相机坐标系在世界坐标系中的朝向和原点位置,因此称为相机位姿。
- 具体的,旋转矩阵的第一列到第三列分别表示了相机坐标系的X, Y, Z轴在世界坐标系下对应的方向;
- 平移向量表示的是相机原点在世界坐标系的对应位置。
$w2c = \left[\begin{array}{c|c}\mathbf{R}&t\\\hline\mathbf{0}&1\end{array}\right] = \left[\begin{array}{c|c}\mathbf{R}_{c}^{\top}&-\mathbf{R}_{c}^{\top}\mathbf{C}\\\hline\mathbf{0}&1\\\end{array}\right]$
$\mathbf{d_{w}}= \begin{bmatrix}r_{11}&r_{12}&r_{13}&t_x\\ r_{21}&r_{22}&r_{23}&t_y\\ r_{31}&r_{32}&r_{33}&t_z\\ 0&0&0&1\end{bmatrix} \begin{bmatrix}X_w\\Y_w\\Z_w\\1\end{bmatrix} = \begin{bmatrix}X_c\\Y_c\\Z_c\\1\end{bmatrix}$
$\mathbf{o_w}=\begin{bmatrix}r_{11}&r_{12}&r_{13}&t_x\\ r_{21}&r_{22}&r_{23}&t_y\\ r_{31}&r_{32}&r_{33}&t_z\\ 0&0&0&1\end{bmatrix} \begin{pmatrix}0\\0\\0\\1\end{pmatrix} = \begin{pmatrix}t_x\\t_y\\t_z\\1\end{pmatrix}$
同理由于R转置为$R_c$,因此在w2c中,第一行的X为相机坐标系的X轴在世界坐标系下对应方向
$w2c = [R ,t] = \begin{bmatrix} X & t_{x} \\ Y & t_{y} \\ Z & t_{z} \\ \end{bmatrix}$
$t=(t_{x},t_{y},t_{z})^{\top}$为世界坐标系原点在相机坐标系下的位置
i.e.:
- $\mathbf{R} = \mathbf{R}_{c}^{\top}$ <==> $\mathbf{R}_{c} = \mathbf{R}^{\top}$
- $t = - \mathbf{R}_{c}^{\top}\mathbf{C}$ <==> $\mathbf{C} = - \mathbf{R}_{c} t$
Neus(pose)
在colmap_read_model.py中读取colmap文件信息,得到w2c并转换为c2w
在gen_cameras.py中将c2w转换为w2c,然后world_mat = intrinsic @ w2c = w2p
在Dataset()中:
- 加载world_mat(w2p),
- P = world_mat @ scale_mat(ws2w) = ws2p
- 对P进行decomposeProjectionMatrix,得到intrinsics(c2p)和pose(c2ws)
- 使用c2ws时对世界坐标进行缩放,使得训练时感兴趣物体在单位坐标系内
intrinsic:(pixel to camera)
1 | fx, fy, cx, cy = intrinsics[0,0] * factor, intrinsics[1,1] * factor, intrinsics[0,2] * factor, intrinsics[1,2] * factor |
pose:(camera to scaled world)
rays_v = pose[:3,:3] @ directions_camsrays_o = pose[:3, 3].expand(rays_v.shape)
NeRO
在database.py的_normalize中,对self.poses(w2c)作变换,使得变换后的self.poses为w’2c,即新的世界坐标系到相机坐标系的变换
其中w2c也乘以了scale,这也是为了使得c2w时对世界坐标进行缩放/scale_mat,使得训练时感兴趣物体在单位坐标系内
1 | # pose w2c --> w'2c |
pose: w2c (3,4)
$w2c = \left[\begin{array}{c|c}\mathbf{R}&t\\\hline\mathbf{0}&1\end{array}\right] = \left[\begin{array}{c|c}\mathbf{R}_{c}^{\top}&-\mathbf{R}_{c}^{\top}\mathbf{C}\\\hline\mathbf{0}&1\\\end{array}\right]$
i.e.:
- $\mathbf{R} = \mathbf{R}_{c}^{\top}$ <==> $\mathbf{R}_{c} = \mathbf{R}^{\top}$
- $t = - \mathbf{R}_{c}^{\top}\mathbf{C}$ <==> $\mathbf{C} = - \mathbf{R}_{c} t$
$\mathbf{C} = - \mathbf{R}^{\top} t$
世界坐标系下相机原点C: rays_o = poses[:, :, :3].permute(0, 2, 1) @ -poses[:, :, 3:]
世界坐标系下光线方向:rays_d = poses[idxs, :, :3].permute(0, 2, 1) @ rays_d.unsqueeze(-1) # (rays_d = ray_batch[‘dirs’])
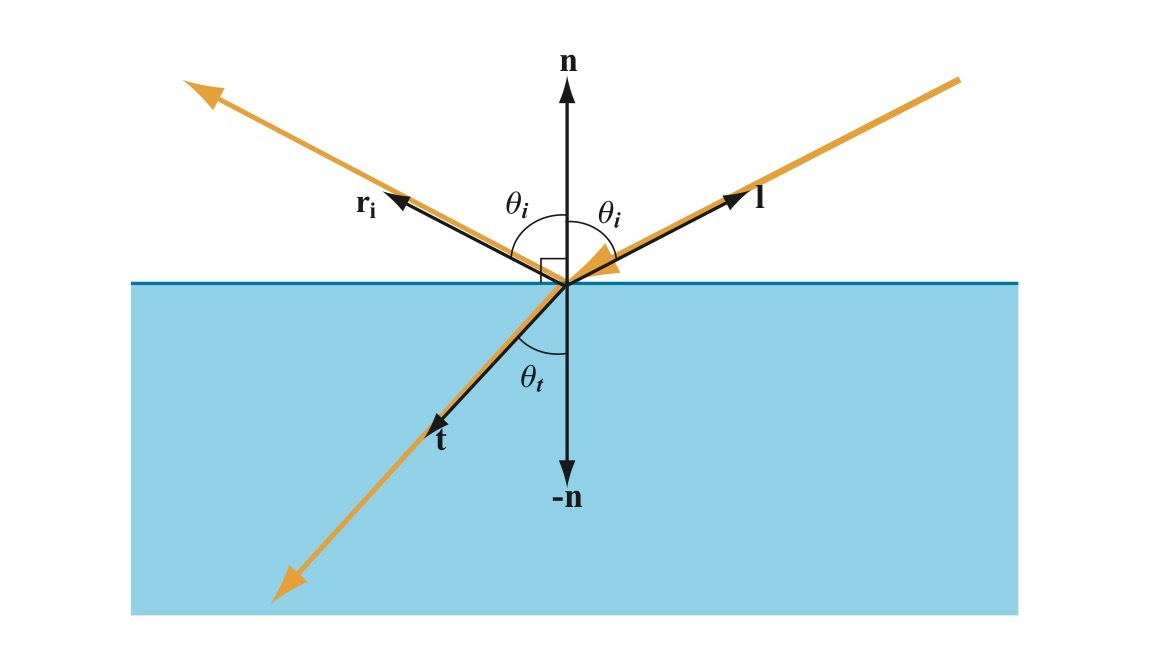
镜面反射
Phong Reflection Model
$I_{Phong}=k_{a}I_{a}+k_{d}(n\cdot l)I_{d}+k_{s}(r\cdot v)^{\alpha}I_{s}$
- 其中下标$a$表示环境光(Ambient Light),下标$d$表示漫射光(Diffuse Light),下标$s$表示镜面光(Specular Light),$k$表示反射系数或者材质颜色,$I$表示光的颜色或者亮度,$\alpha$可以模拟表面粗糙程度,值越小越粗糙,越大越光滑
- 入射方向$\mathbf{l}$,反射方向$\mathbf{r} = 2(\mathbf{n} \cdot \mathbf{l})\mathbf{n} - \mathbf{l}$,法向量$\mathbf{n}$
漫射光和高光分别会根据入射方向、反射方向和观察方向的变化而变化,还可以通过$\alpha$参数来调节表面粗糙程度,从而控制高光区域大小和锐利程度,而且运算简单,适合当时的计算机处理能力。
Blinn-Phong Reflection Model
$I_{Blinn-Phong}=k_aI_a+k_d(n\cdot l)I_d+k_s(n\cdot h)^\alpha I_s$
- 半角向量$\mathbf{h}$为光线入射向量和观察向量的中间向量:$h=\frac{l+v}{||l+v||}$
- Blinn-Phong相比Phong,在观察方向趋向平行于表面时,高光形状会拉长,更接近真实情况。
基于物理的分析模型
1967年Torrance-Sparrow在Theory for Off-Specular Reflection From Roughened Surfaces中使用辐射度学和微表面理论推导出粗糙表面的高光反射模型,1981年Cook-Torrance在A Reflectance Model for Computer Graphics中把这个模型引入到计算机图形学领域,现在无论是CG电影,还是3D游戏,基于物理着色都是使用的这个模型。Cook-Torrance:ROBERT L. COOK 和 KENNETH E. TORRANCE,提出这个BRDF的文章叫做《A Reflectance Model for Computer Graphics》,发表于1982年。
PBR 中的 Cook-Torrance BRDF 中,Cook-Torrance 是谁? - 房燕良的回答 - 知乎 https://www.zhihu.com/question/351339310/answer/865238779
- 辐射度学(Radiometry)是度量电磁辐射能量传输的学科,也是基于物理着色模型的基础。
- 能量(Energy)$Q$,单位焦耳($J$),每个光子都具有一定量的能量,和频率相关,频率越高,能量也越高,(波长越短)。
- 功率(Power),单位瓦特(Watts),或者焦耳/秒(J/s)。
- 辐射度学中,辐射功率也被称为辐射通量(Radiant Flux)或者通量(Flux),指单位时间内通过表面或者空间区域的能量的总量,用符号$Φ$表示:$\Phi={\frac{dQ}{dt}}。$
- 辐照度(Irradiance),单位时间内到达单位面积的辐射能量,或到达单位面积的辐射通量。单位$W/m^2$ ,$E={\frac{d\Phi}{dA}}。$辐照度衡量的是到达表面的通量密度
- 辐出度(Radiant Existance),辐出度衡量的是离开表面的通量密度
- 辐照度和辐出度都可以称为辐射通量密度(Radiant Flux Density)离光源越远,通量密度越低
- 辐射强度
- 立体角(Solid Angle)立体角则是度量三维角度的量,用符号$\omega$表示,单位为立体弧度(也叫球面度,Steradian,简写为sr)等于立体角在单位球上对应的区域的面积(实际上也就是在任意半径的球上的面积除以半径的平方$\omega=\frac{s}{r^{2}}$),单位球的表面积是$4\pi$,所以整个球面的立体角也是$4\pi$。
- 我们可以用一个向量和一个立体角来表示一束光线,向量表示这束光线的指向,立体角表示这束光线投射在单位球上的面积,也就是光束的粗细。
- 辐射强度(Radiant Intensity),指通过单位立体角的辐射通量。用符号$I$表示,单位W/sr,定义为$I=\frac{d\Phi}{d\omega}$
- 辐射强度不会随距离变化而变化,不像点光源的辐照度会随距离增大而衰减,这是因为立体角不会随距离变化而变化。
- 辐射率(Radiance),指每单位面积每单位立体角的辐射通量密度。用符号$L$表示,单位$W/m^{2}sr$,$L=\frac{d\Phi}{d\omega dA^{\perp}}$其中$dA^{\perp}$⊥是微分面积$dA$在垂直于光线方向的投影,如下图所示
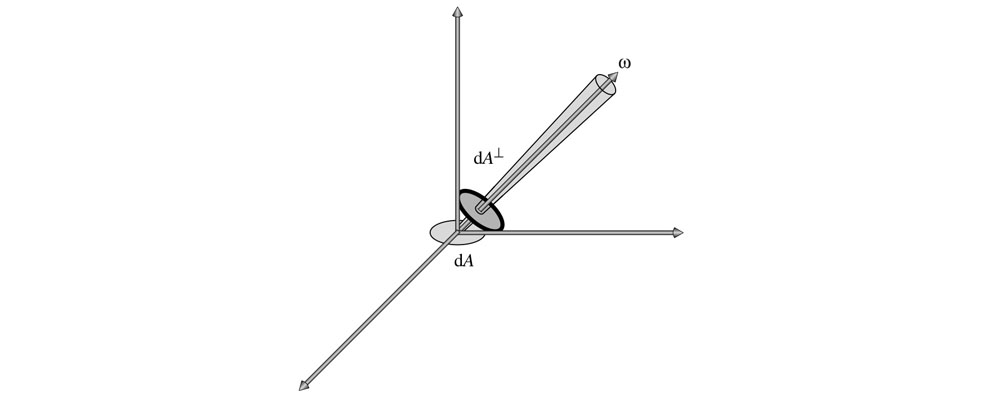
- 辐射率实际上可以看成是我们眼睛看到(或相机拍到)的物体上一点的颜色。在基于物理着色时,计算表面一点的颜色就是计算它的辐射率。
- 辐射率不会随距离变化而衰减,这和我们日常感受一致,在没有雾霾的干扰时,我们看到的物体表面上一点的颜色并不会随距离变化而变化。为什么辐照度会随距离增大而衰减,但是我们看到的颜色却不会衰减呢?这是因为随着距离变大,我们看到的物体上的一块区域到达视网膜的通量密度会变小,同时这块区域在视网膜表面上的立体角也会变小,正好抵消了通量密度的变化。
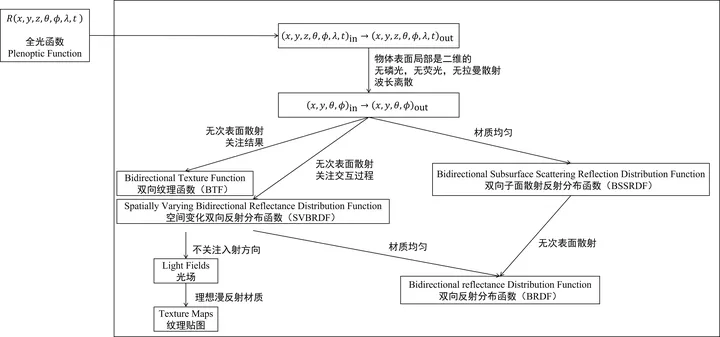
BRDF
我们看到一个表面,实际上是周围环境的光照射到表面上,然后表面将一部分光反射到我们眼睛里,双向反射分布函数BRDF(Bidirectional Reflectance Distribution Function)是描述表面入射光和反射光关系的。
对于一个方向的入射光,表面会将光反射到表面上半球的各个方向,不同方向反射的比例是不同的,我们用BRDF来表示指定方向的反射光和入射光的比例关系
$f(l,v)=\frac{dL_{o}(v)}{dE(l)}$
- $l$是入射光方向,$v$是观察方向,也就是我们关心的反射光方向。
- $dL_{o}(v)$是表面反射到$v$方向的反射光的微分辐射率。表面反射到$v$方向的反射光的辐射率为$L_{o}(v)$,来自于表面上半球所有方向的入射光线的贡献,而微分辐射率$dL_{o}(v)$特指来自方向$l$的入射光贡献的反射辐射率。$W/m^{2}sr$
- $dE(l)$是表面上来自入射光方向$l$的微分辐照度。表面接收到的辐照度为$E(l)$,来自上半球所有方向的入射光线的贡献,而微分辐照度$dE(l)$特指来自于方向$l$的入射光。$W/m^2$
- BRDF:f单位为$\frac{1}{sr}$
表面对不同频率的光反射率可能不一样,因此BRDF和光的频率有关。在图形学中,将BRDF表示为RGB向量,三个分量各有自己的$f$函数
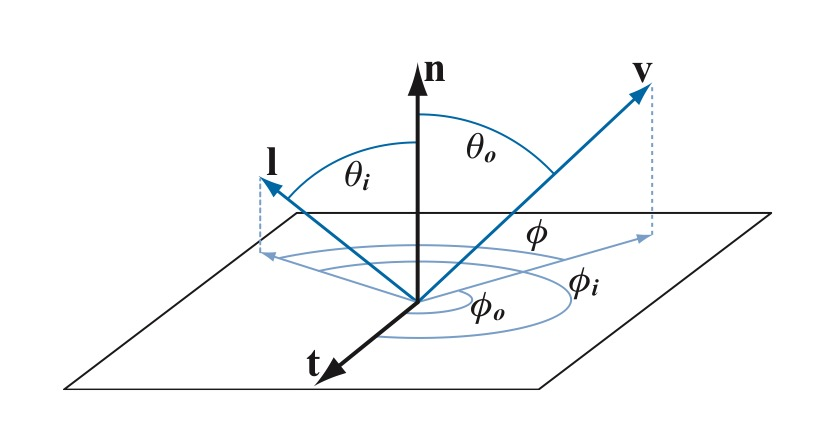
BRDF需要处理表面上半球的各个方向,如下图使用球坐标系定义方向更加方便。球坐标系使用两个角度来确定一个方向:
- 方向相对法线的角度$\theta$,称为极角(Polar Angle)或天顶角(Zenith Angle)
- 方向在平面上的投影相对于平面上一个坐标轴的角度$\phi$,称为方位角(Azimuthal Angle)
因此BRDF也可以写成:$f(\theta_i,\phi_i,\theta_o,\phi_o)$
怎么用BRDF来计算表面辐射率
来自方向$l$的入射辐射率:$L_i(l)=\frac{d\Phi}{d\omega_idA^-}=\frac{d\Phi}{d\omega_idAcos\theta_i}=\frac{dE(l)}{d\omega_icos\theta_i}$
则照射到表面来自于方向$l$的入射光贡献的微分辐照度:$dE(l)=L_i(l)d\omega_icos\theta_i$
- 表面反射到$v$方向的由来自于方向$l$的入射光贡献的微分辐射率:$dL_o(v)=f(l,v)\otimes dE(l)=f(l,v)\otimes L_i(l)d\omega_icos\theta_i$
- 要计算表面反射到$v$方向的来自上半球所有方向入射光线贡献的辐射率,可以将上式对半球所有方向的光线积分:$L_{o}(v)=\int_{\Omega}f(l,v)\otimes L_{i}(l)cos\theta_{i}d\omega_{i}$(表面反射辐射率即方向$v$观察到的颜色)
对于点光源、方向光等理想化的精准光源(Punctual Light),计算过程可以大大简化。我们考察单个精准光源照射表面,此时表面上的一点只会被来自一个方向的一条光线照射到(而面积光源照射表面时,表面上一点会被来自多个方向的多条光线照射到),则辐射率:$L_o(v)=f(l,v)\otimes E_Lcos\theta_i$,or多条光线:$L_{o}(v)=\sum_{k=1}^{n}f(l_{k},v)\otimes E_{L_{k}}cos\theta_{i_{k}}$
- 这里使用光源的辐照度,对于阳光等全局方向光,可以认为整个场景的辐照度是一个常数,对于点光源,辐照度随距离的平方衰减,用公式$E_{L}=\frac{\Phi}{4\pi r^{2}}$就可以求出到达表面的辐照度,Φ是光源的功率,比如100瓦的灯泡,r是表面离光源的距离
BRDF(Microfacet Theory)
我们用法线分布函数(Normal Distribution Function,简写为NDF)D(h)来描述组成表面一点的所有微表面的法线分布概率,现在可以这样理解:向NDF输入一个朝向ℎ,NDF会返回朝向是ℎ的微表面数占微表面总数的比例(虽然实际并不是这样,这点我们在讲推导过程的时候再讲),比如有1%的微表面朝向是ℎ,那么就有1%的微表面可能将光线反射到v方向。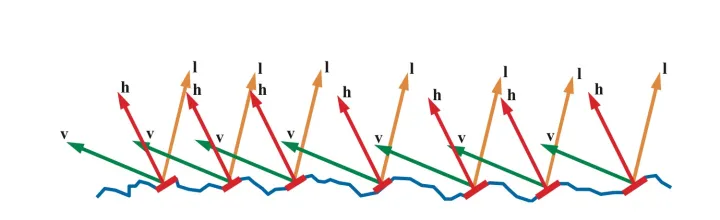
实际上并不是所有微表面都能收到接受到光线,如下面左边的图有一部分入射光线被遮挡住,这种现象称为Shadowing。也不是所有反射光线都能到达眼睛,下面中间的图,一部分反射光线被遮挡住了,这种现象称为Masking。光线在微表面之间还会互相反射,如下面右边的图,这可能也是一部分漫射光的来源,在建模高光时忽略掉这部分光线。
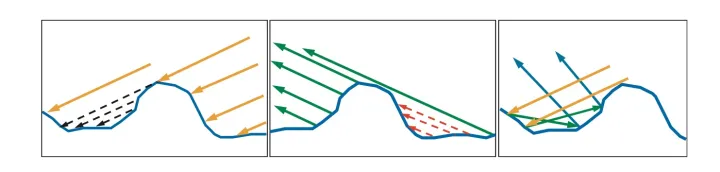
- Shadowing和Masking用几何衰减因子(Geometrical Attenuation Factor)$G(l,v)$来建模,输入入射和出射光线方向,输出值表示光线未被遮蔽而能从$l$反射到$v$方向的比例
- 光学平面并不会将所有光线都反射掉,而是一部分被反射,一部分被折射,反射比例符合菲涅尔方程(Fresnel Equations)$F(l,h)$
则BRDF镜面反射部分:
$f(l,v)=\frac{F(l,h)G(l,v)D(h)}{4cos\theta_icos\theta_o}=\frac{F(l,h)G(l,v)D(h)}{4(n\cdot l)(n\cdot v)}$
- n为宏观表面法线
- h为微表面法线
光照模型有很多种1,Cook-Torrance 光照模型是最常用的。光照一般划分为漫反射和高光。漫反射模型提出的有 Lambert、 Oren-Nayar、Minnaert 三种,它们有着不同的计算公式。Cook-Torrance 采用 Lambert 漫反射后的计算如下:
$f=k_{d}f_{lambert}+k_{s}f_{cook-torrance},\quad f_{lambert}=\frac{c_{diffuse}}{\pi}$
反照率(albedo)是行星物理学中用来表示天体反射本领的物理量,定义为物体的辐射度(radiosity)与辐照度(irradiance)之比。射是出,照是入,出射量除以入射量,得到无量纲量。绝对黑体(black body)的反照率是0。煤炭呈黑色,反照率 接近0,因为它吸收了投射到其表面上的几乎所有可见光。镜面将可见光几乎全部反射出去,其反照率接近1。albedo 翻译成反照率,与 reflectance(反射率)是有区别的。反射率用来表示某一种波长的反射能量与入射能量之比;而反照率用来表示全波段的反射能量与入射能量之比。BRDF 的 R 是 reflectance,方程仅关注一种波长。
NeRO中的BRDF
Specular
微面BRDF,参考上
Diffuse
Physically Based Rendering - 就决定是你了 | Ciel’s Blog (ciel1012.github.io)
specular用于描述光线击中物体表面后直接反射回去,使表面看起来像一面镜子。有些光会透入被照明物体的内部。这些光线要么被物体吸收(通常转换为热量),要么在物体内被散射。有一些散射光线有可能会返回表面,被眼球或相机捕捉到,这就是diffuse light。diffuse和subsurface scattering(次表面散射)描述的都是同一个现象。
根据材质,吸收和散射的光通常具有不同波长,因此仅有部分光被吸收,使得物体具有了颜色。散射通常是方向随机的,具有各向同性。使用这种近似的着色器只需要输入一个反照率(albedo),用来描述从表面散射回来的各种颜色的光的分量。Diffuse color有时是一个同义词。
镜面反射和漫反射是互相排斥的。这是因为,如果一个光线想要漫反射,它必须先透射进材质里,也就是说,没有被镜面反射。这在着色语言中被称为“Energy Conservation(能量守恒)”,意思是一束光线在射出表面以后绝对不会比射入表面时更亮。
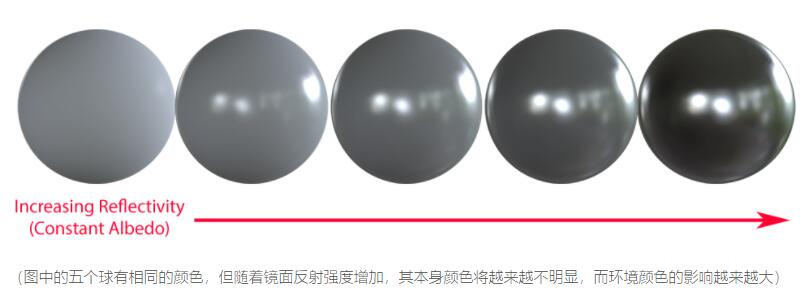
金属度相当于镜面反射,金属度越高,镜面反射越强
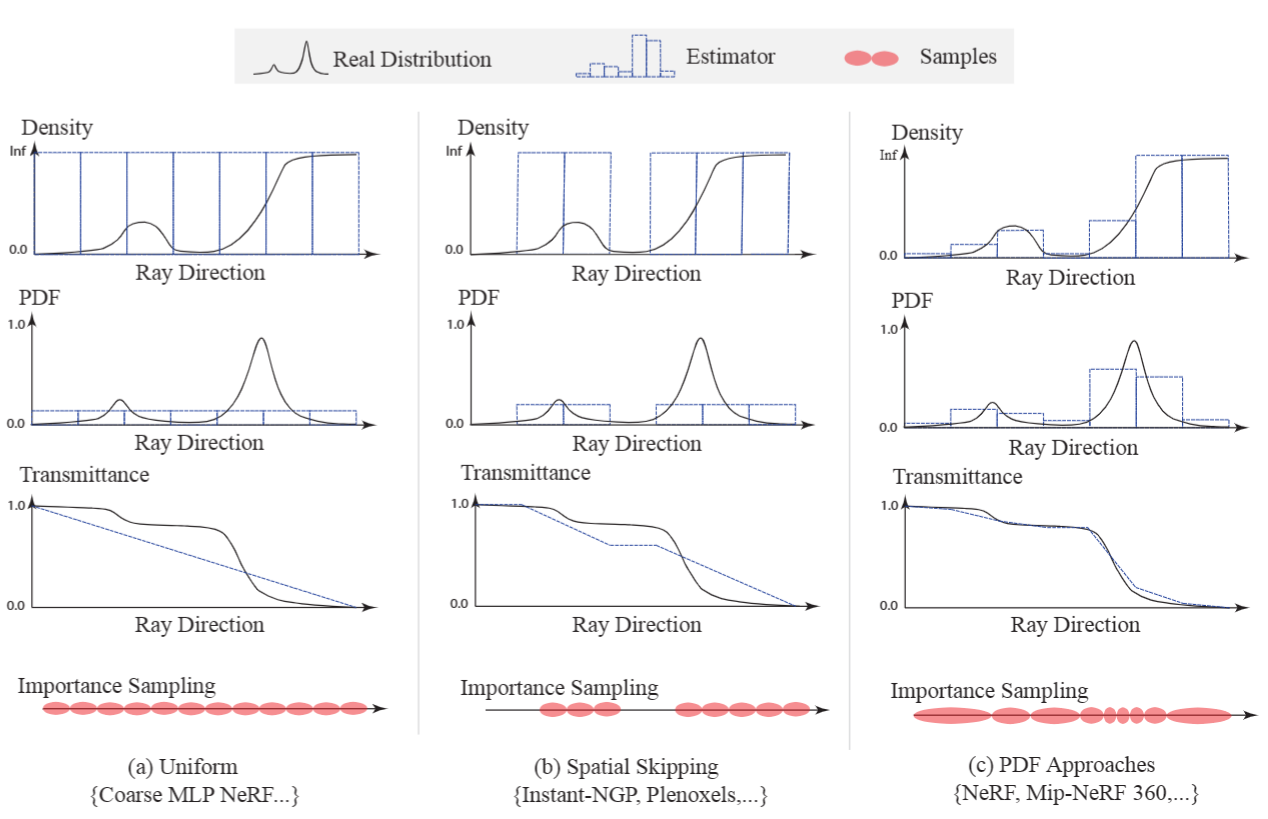
采样方式
将像素看成一个点,射出的光线是一条直线
(NerfAcc)可大致分为:
- 平均采样(粗采样)
- 空间跳跃采样(NGP中对空气跳过采样)
- 逆变换采样(根据粗采样得到的w分布进行精采样)
平均采样
i.e. 粗采样,在光线上平均采样n个点
占据采样
Occupancy Grids
通过在某分辨率占用网格中进行更新占用网格的权重,来确定哪些网格需要采样
逆变换采样
NeRF
简单的逆变换采样方法:根据粗采样得到的权重进行逆变换采样,获取精采样点
逆变换采样 - 知乎 (zhihu.com)
1 | def sample_pdf(bins, weights, N_samples, det=False, pytest=False): |
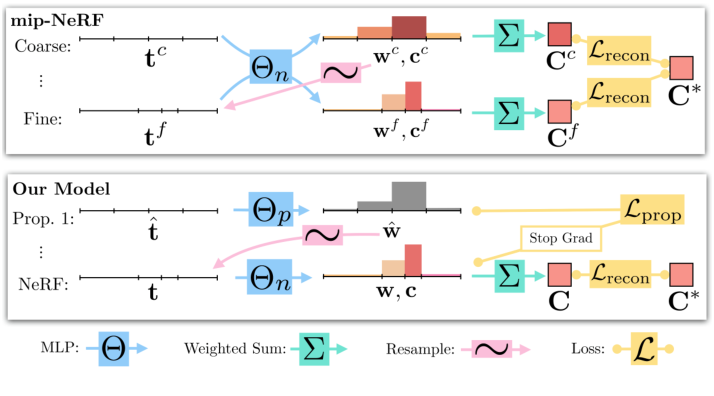
Mip-NeRF360
构建了一个提议网格获取权重来进行精采样(下)
锥形光线采样
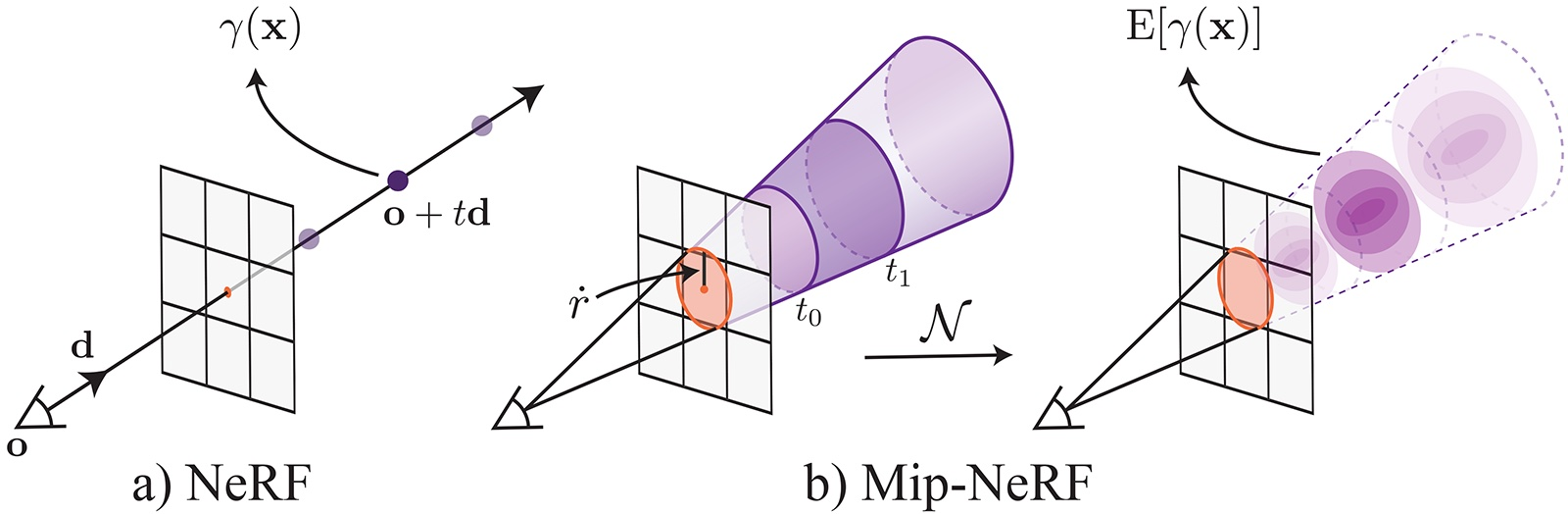
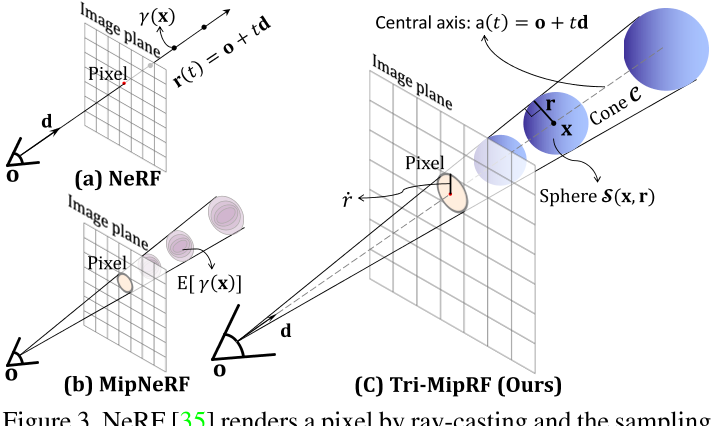
Mip-NeRF
将像素看成有面积的圆盘,射出的光线为一个圆锥体
- 使用多元高斯分布来近似截锥体
Tri-MipRF
- 使用一个各项同性的球来近似截锥体
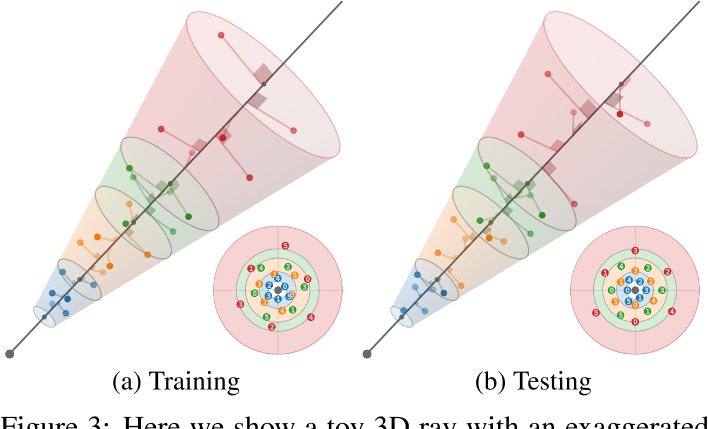
Zip-NeRF
Multisampling
多采样:在一个截锥体中沿着光线采样6个点,每个点之间旋转一个角度
对输入x进行编码的方式
Field Encoders - nerfstudio
编码方式
频率编码
NeRF from Scratch. Motivating the explanation from… | by Raja Parikshat | Medium 入门
Fourier Features Let Networks Learn High Frequency Functions in Low Dimensional Domains
Frequency Encoding(Fourier Features), 作用:神经网络偏向于学习低频,提出的解决方案是使用位置编码,使用高频函数把输入映射到更高维的空间中,再传递到神经网络,可以更好地拟合具有高频变化的数据。
$\gamma(p)=\left(\sin \left(2^{0} \pi p\right), \cos \left(2^{0} \pi p\right), \cdots, \sin \left(2^{L-1} \pi p\right), \cos \left(2^{L-1} \pi p\right)\right)$
- $p=x|y|z$
- $L= constant$
NeRF
1 | class Embedder: |
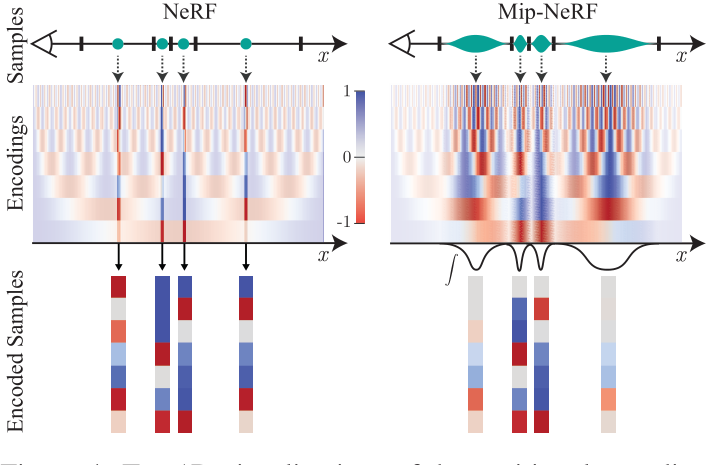
IPE
Mip-NeRF集成位置编码
对多元高斯近似截锥体的均值和协方差进行编码
IPE可以将大区域的高频编码求和为0
多分辨率哈希编码
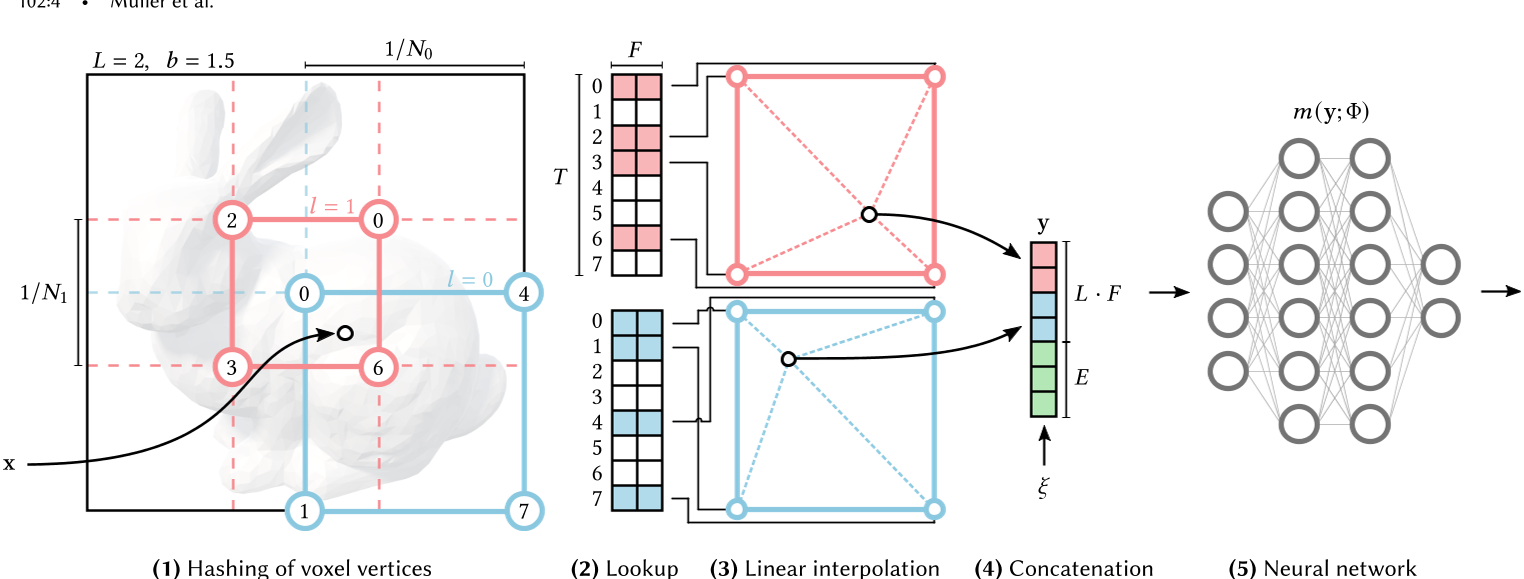
1 | hashgrid.py: |
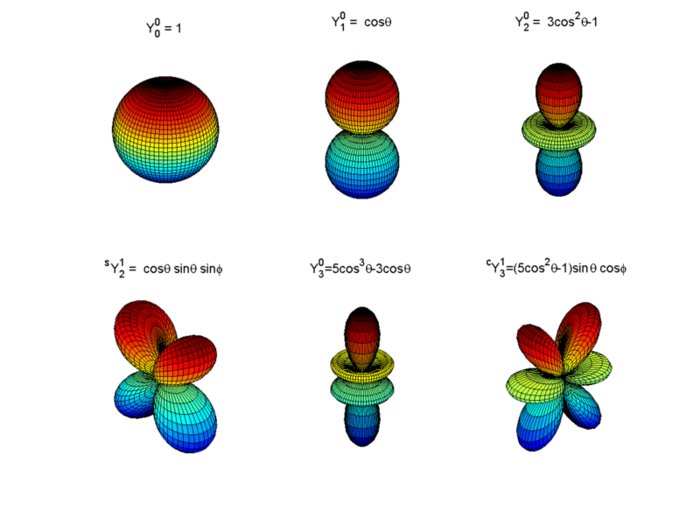
球面谐波编码
球面基函数——球谐函数
$\{Y_\ell^m\}.$ 与二维的三角函数基类似,球面谐波为三维上的一组基函数,用来描述其他更加复杂的函数
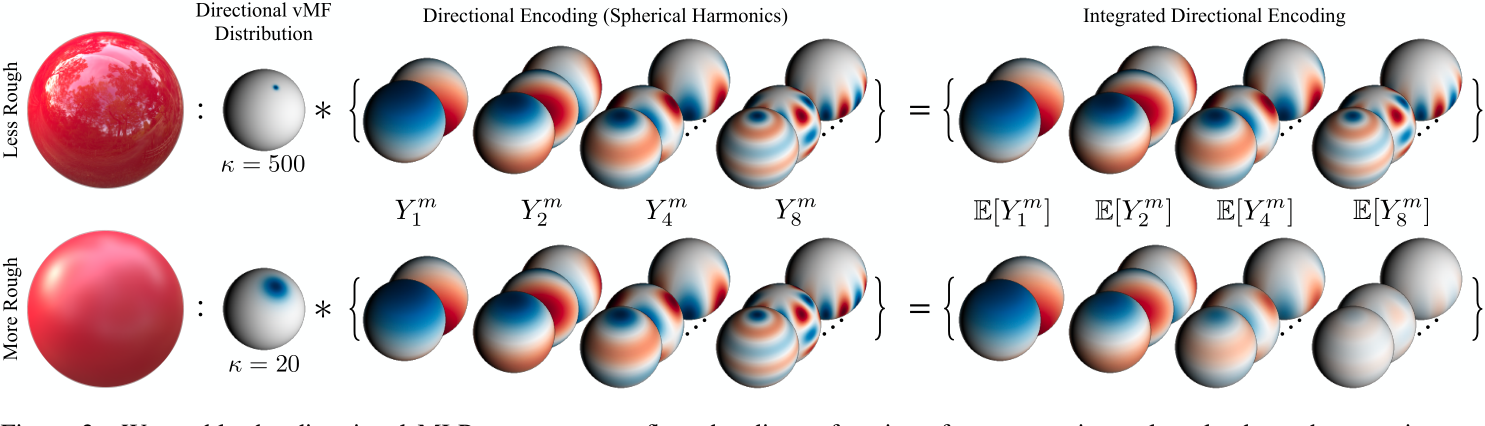
IDE
在Ref-NeRF中,借鉴Mip-NeR中的IPE,提出了IDE,基于球面谐波,将高频部分的编码输出置为0
$\mathrm{IDE}(\hat{\boldsymbol{\omega}}_r,\kappa)=\left\{\mathbb{E}_{\hat{\boldsymbol{\omega}}\sim\mathrm{vMF}(\hat{\boldsymbol{\omega}}_r,\kappa)}[Y_\ell^m(\hat{\boldsymbol{\omega}})]\colon(\ell,m)\in\mathcal{M}_L\right\},$
$\mathcal{M}_{L}=\{(\ell,m):\ell=1,…,2^{L},m=0,…,\ell\}.$
$\mathbb{E}_{\hat{\boldsymbol{\omega}}\sim\mathrm{vMF}(\hat{\boldsymbol{\omega}}_r,\kappa)}[Y_\ell^m(\hat{\boldsymbol{\omega}})]=A_\ell(\kappa)Y_\ell^m(\hat{\boldsymbol{\omega}}_r),$
$A_{\ell}(\kappa)\approx\exp\left(-\frac{\ell(\ell+1)}{2\kappa}\right).$