| Title | MonoSDF: Exploring Monocular Geometric Cues for Neural Implicit Surface Reconstruction | |
|---|---|---|
| Author | Zehao Yu1 Songyou Peng2,3 Michael Niemeyer1,3 Torsten Sattler4 Andreas Geiger1,3 | |
| Conf/Jour | NeurIPS | |
| Year | 2022 | |
| Project | MonoSDF (niujinshuchong.github.io) | |
| Paper | MonoSDF: Exploring Monocular Geometric Cues for Neural Implicit Surface Reconstruction (readpaper.com) [MonoSDF: Exploring Monocular Geometric Cues for Neural Implicit Surface Reconstruction \ |
PDF](https://arxiv.org/pdf/2206.00665) |
深度+法向量监督
AIR
目前的 neural implicit surface reconstruction方法无法处理大的、复杂的和稀疏视图的场景重建。主要是由于RGB 重建loss的内在模糊性无法提供足够的约束,in particular in less-observed and textureless areas
本文 demonstrate that depth and normal cues, predicted by general-purpose monocular estimators, significantly improve reconstruction quality and optimization time. 都有着提升
- 不管是什么表示方法:monolithic MLP models over single-grid to multi-resolution grid representations.
- 也不管是什么场景:small-scale single-object as well as large-scale multi-object scenes
Method
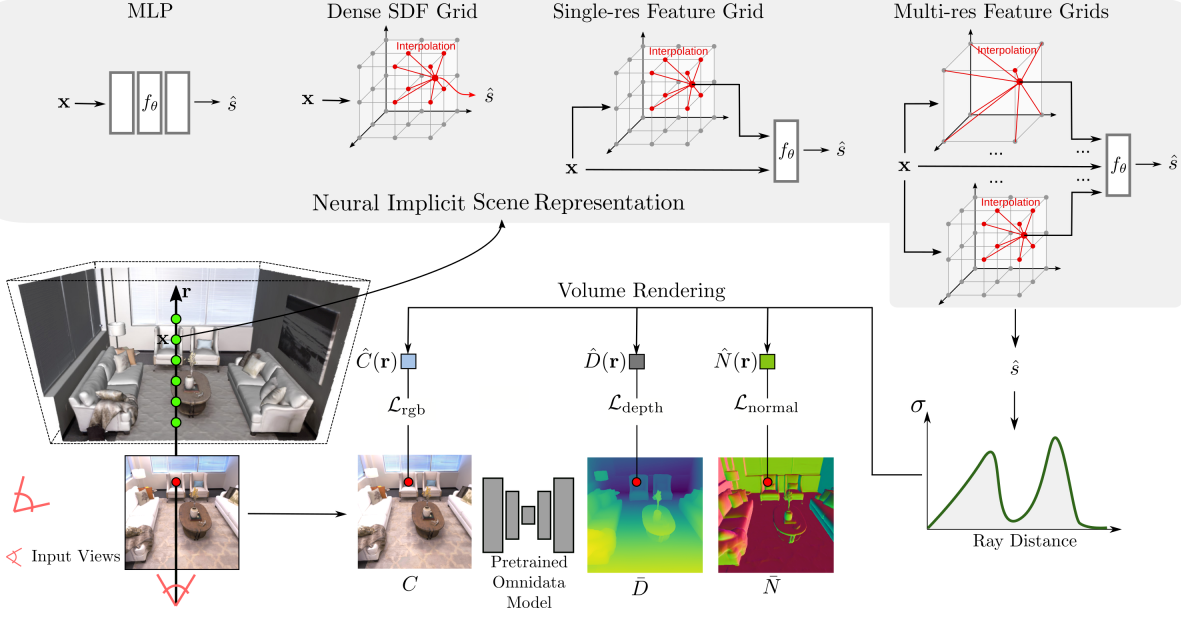
Implicit scene representations:$f:\mathbb{R}^3\to\mathbb{R}\quad\mathrm{~x}\mapsto s=\mathrm{SDF}(\mathbf{x})$ 根据3Dpoint 坐标得到该点的SDF值
SDF Prediction
- Dense SDF Grid
- Single MLP
- Single-Resolution Feature Grid with MLP Decoder
- Multi-Resolution Feature Grid with MLP Decoder
Color Prediction:$\hat{\mathbf{c}}=\mathbf{c}_\theta(\mathbf{x},\mathbf{v},\hat{\mathbf{n}},\hat{\mathbf{z}})$
- 其中$\hat{\mathbf{n}}$为SDF函数的分析梯度 torch.autograd.grad
- 特征向量$\hat{\mathbf{z}}$为SDF网络的输出
Volume Rendering of Implicit Surfaces (VolSDF)
- Density values $\sigma_\beta(s)=\begin{cases}\frac{1}{2\beta}\exp\left(\frac{s}{\beta}\right)&\text{if} s\leq0\\\frac{1}{\beta}\left(1-\frac{1}{2}\exp\left(-\frac{s}{\beta}\right)\right)&\text{if} s>0\end{cases}$ $\beta$ 是一个可学习的参数
- $\hat{C}(\mathbf{r})=\sum_{i=1}^MT_\mathbf{r}^i\alpha_\mathbf{r}^i\hat{\mathbf{c}}_\mathbf{r}^i$
- $T_\mathbf{r}^i=\prod_{j=1}^{i-1}\left(1-\alpha_\mathbf{r}^j\right)$
- $\alpha_\mathbf{r}^i=1-\exp\left(-\sigma_\mathbf{r}^i\delta_\mathbf{r}^i\right)$
rendering 深度or法向量
- $\hat{D}(\mathbf{r})=\sum_{i=1}^MT_\mathbf{r}^i \alpha_\mathbf{r}^i t_\mathbf{r}^i$
- $\hat{N}(\mathbf{r})=\sum_{i=1}^MT_\mathbf{r}^i \alpha_\mathbf{r}^i \hat{\mathbf{n}}_\mathbf{r}^i$
guided 深度or法向量:使用 pretrained Omnidata model 来当作 monocular depth/normal map predictor
损失函数:$\mathcal{L}=\mathcal{L}_\mathrm{rgb}+\lambda_1\mathcal{L}_\mathrm{eikonal}+\lambda_2\mathcal{L}_\mathrm{depth}+\lambda_3\mathcal{L}_\mathrm{normal}$
- $\mathcal{L}_{\mathrm{rgb}}=\sum_{\mathbf{r}\in\mathcal{R}}\left|\hat{C}(\mathbf{r})-C(\mathbf{r})\right|_1$
- $\mathcal{L}_{\mathrm{eikonal}}=\sum_{\mathbf{x}\in\mathcal{X}}(\left|\nabla f_\theta(\mathbf{x})\right|_2-1)^2$
- $\mathcal{L}_{\mathrm{depth}}=\sum_{\mathbf{r}\in\mathcal{R}}\left|(w\hat{D}(\mathbf{r})+q)-\bar{D}(\mathbf{r})\right|^2$
- $w$ and $q$ are scale and shift used to aligh $\hat{D}$与$\bar{D}$ 每个batch需要被独立估计??
- $(w,q)=\underset{w,q}{\arg\min}\sum\limits_{\mathbf{r}\in\mathcal{R}}\Big(w\hat{D}(\mathbf{r})+q-\bar{D}(\mathbf{r})\Big)^2$ solve w and q with a least-squares criterion
- $\mathbf{h}^{\mathrm{opt}}=\underset{\mathbf{h}}{\operatorname*{\arg\min}}\sum_{\mathbf{r}\in\mathcal{R}}\left(\mathbf{d}_{\mathbf{r}}^T\mathbf{h}-\bar{D}(\mathbf{r})\right)^2$ $:\text{Let h}=(w,q)^T\text{ and }\mathbf{d_r}=(\hat{D}(\mathbf{r}),1)^T$
- $\mathbf{h}=\left(\sum_\mathbf{r}\mathbf{d_r}\mathbf{d_r}^T\right)^{-1}\left(\sum_\mathbf{r}\mathbf{d_r}\bar{D}(\mathbf{r})\right)$
- 对一个从单张图中随机采样光线的一个batch必须被独立估计 由于depth maps predicted by the monocular depth predictor can differ in scale and shift and the underlying scene geometry changes at each iteration.
- $\mathcal{L}_{\mathrm{normal}}=\sum_{\mathrm{r}\in\mathcal{R}}|\hat{N}(\mathbf{r})-\bar{N}(\mathbf{r})|_1+|1-\hat{N}(\mathbf{r})^\top\bar{N}(\mathbf{r})|_1$
Experiments

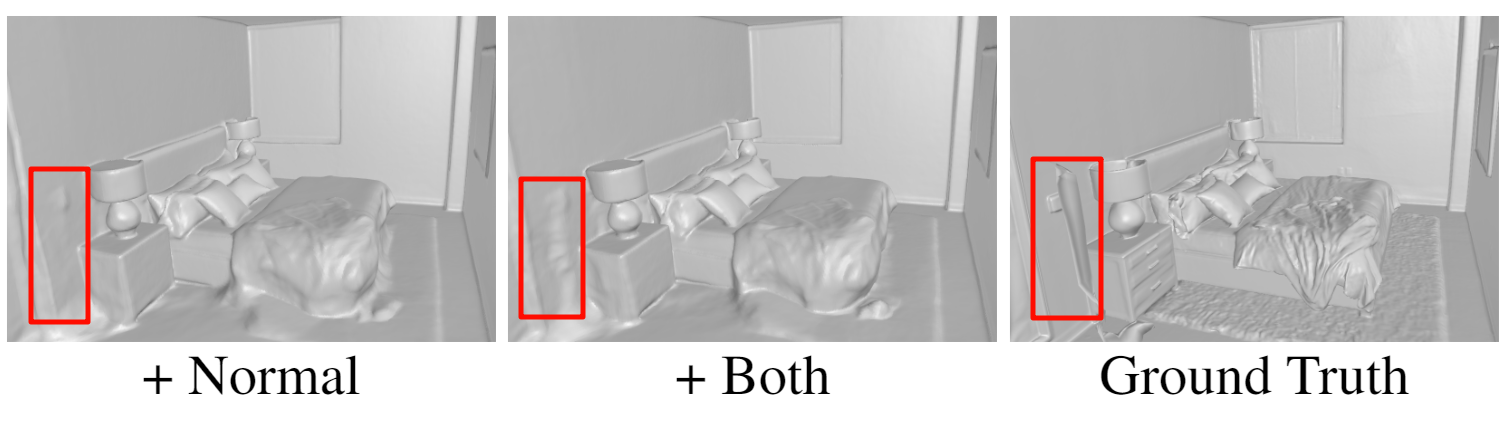
深度图的作用没那么明显,并且depth和normal先验都无法重建出开关处的细节
Discussion
Future:
- 使用更加精确的 depth or normal estimator
- exploring other cues such as occlusion edges, plane, or curvature is an interesting future direction
- 更加高分辨率的 depth or normal cues
- 相机噪声Joint optimization of scene representations and camera parameters [4, 92] is another interesting direction, especially for multi-resolution grids, in order to better handle noisy camera poses.