更好的重建效果需要拍摄的图片保证:
- 好的纹理
- 相似的照明条件,避免高动态范围场景(例如,逆光阴影或透过门窗的照片),避免在光滑表面上出现反射光
- 高视觉重叠度,确保每个对象至少在 3 张图像中可见,图像越多越好
- 从不同的视角拍摄图像,不要只通过旋转相机来拍摄相同位置的图像
Colmap 算法主要包括 SFM 和 MVS
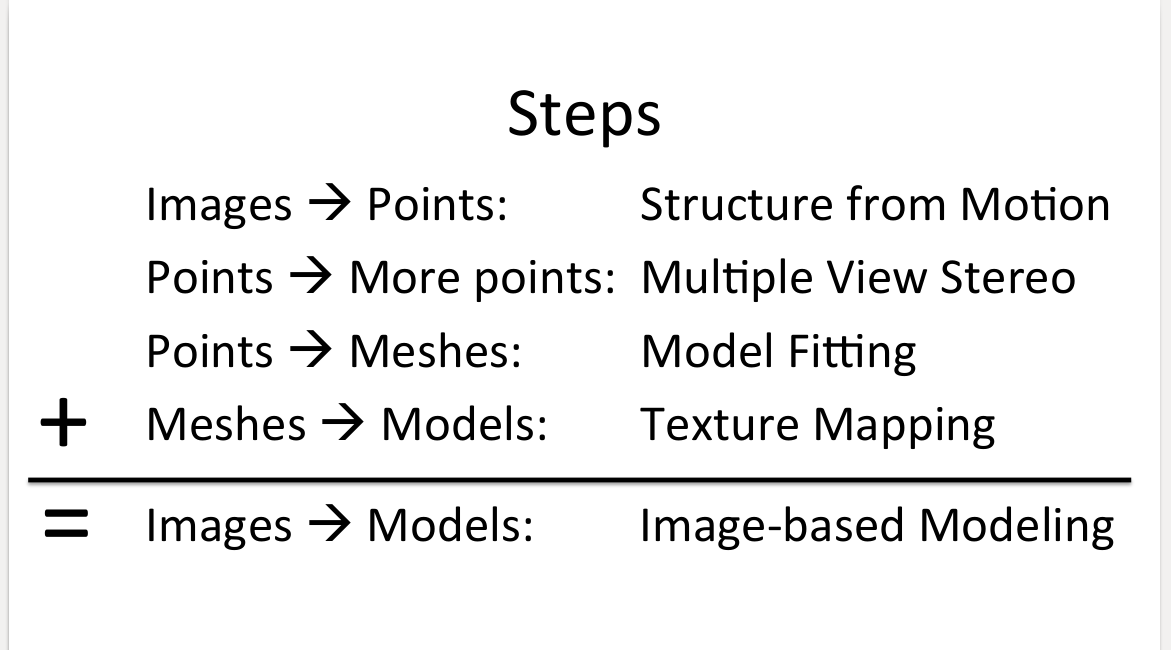
Structure-from-Motion(SFM)
Structure-from-Motion Revisited (readpaper.com) > SFM 算法原理初简介 | jiajie (gitee.io)
增量式 SFM:输入一系列从多个不同视角对相同物体 overlapping 的图像,输出稀疏 3D 点云和所有图像对应的相机内外参
- Feature detection and extraction
- Feature matching and geometric verification
- Structure and motion reconstruction
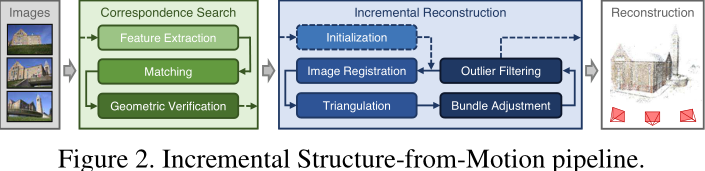
SFM:
- Correspondence Search. 输入图像 —> 一组经过几何验证的图像对,以及每个点的图像投影图
- Feature Extraction. SIFT 算子(可以是任何一种特异性较强的特征)
- SIFT 算法(Scale-invariant feature transform)是一种电脑视觉的算法用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe 在 1999 年所发表,2004 年完善总结, ref: 非常详细的 sift 算法原理解析_可时间倒数了的博客-CSDN 博客
- 改进的SIFT算法,mickey: Matching 2D Images in 3D: Metric Relative Pose from Metric Correspondences
- Matching.
- Geometric Verification. 如果一个有效的变换在图像之间映射了足够数量的特征,它们就被认为是几何验证的
- 单应性H描述了纯旋转或移动摄像机捕捉平面场景的变换
- 对极几何通过essential矩阵E(校准)或fundamental矩阵F(未校准)描述了移动摄像机的关系,并且可以使用三焦张量扩展到三个视图
- Feature Extraction. SIFT 算子(可以是任何一种特异性较强的特征)
- Incremental Reconstruction. scene graph. —> pose estimates and reconstructed scene structure as a set of points
- Initialization. 选择合适的初始pair至关重要
- Image Registration. 配准:从度量重建开始,通过使用已配准图像中三角点的特征对应(2D-3D对应)来解决Perspective-n-Point (PnP)问题,可以将新图像配准到当前模型
- Triangulation. 三角测量是SfM的关键步骤,因为它通过冗余增加了现有模型的稳定性
- Bundle Adjustment. BA是摄像机参数Pc和点参数Xk的联合非线性细化,使重投影误差最小化
Multi-View Stereo(MVS)
Pixelwise View Selection for Unstructured Multi-View Stereo (readpaper.com)