Diffusion Model
Diffusion Model
$q(x_t|x_{t-1}) = \mathcal{N} (\sqrt{\alpha_t} \ x_{t-1}, (1- \alpha_t ) \textit{I} )$
$\begin{align}\begin{aligned}x_{t} &=\sqrt{\alpha_t} \ x_{t-1} + \mathcal{N} (0, (1- \alpha_t ) \textit{I} )\\&=\sqrt{\alpha_t} \ x_{t-1} + \sqrt{1- \alpha_t } \ \epsilon \ \ \ ,\epsilon \sim \mathcal{N} (0, \textit{I} )\end{aligned}\end{align}$
随着t的增大,$\alpha_{t}$在逐渐变小。这是由于前期如果加的噪声太多,会使得数据扩展的太快(比如突变),使得逆向还原变得困难; 同样因为后期数据本身已经接近随机噪声数据了,后期如果加的噪声不够多,相当于变化幅度小,扩散的太慢,这会使得链路变长需要的事件变多。 我们希望扩散的前期慢一点,后期快一点
通过设定超参数$\alpha_{0:T}$可以看出前向加噪的过程是可以直接通过公式计算的,没有未知参数。
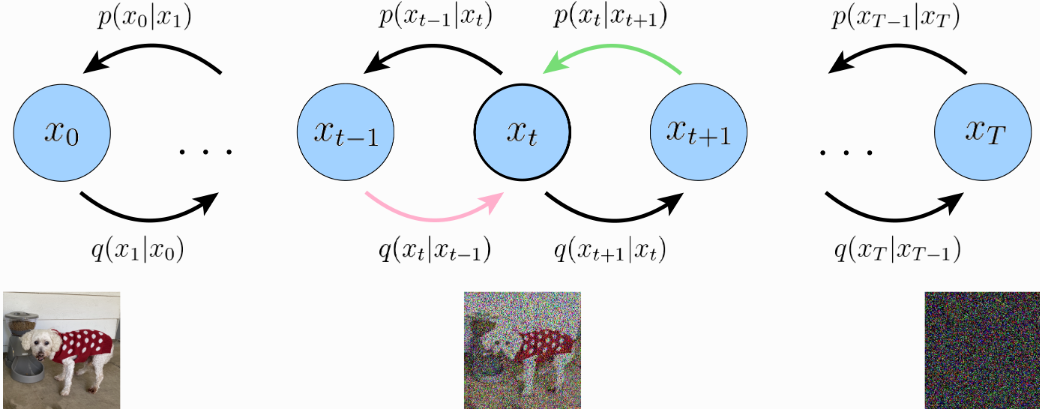
而逆向过程需要从噪声开始,逐步解码成一个有意义的数据 $p(x_{0:T}) = p(x_T) \prod_{t={T-1}}^0 p(x_{t}|x_{t+1})$
- 在这里$p(x_T) \sim \mathcal{N}(0,\textit{I})$ 是高斯分布,但是$p_{\theta}(x_{t}|x_{t+1})$ 是难以求解的(分母部分含有积分,且没有解析解),依次使用网络来拟合学习这一条件概率分布 $p(x_{t}|x_{t+1})=\frac{p(x_{t},x_{t+1})}{p(x_{t+1})}=\frac{p(x_{t+1}|x_{t})p(x_{t})}{\int_{-\infty}^{+\infty}p(x_{t+1}|x_{t})p(x_{t})dx_{t}}.$
- 目标函数(ELBO)我们知道学习一个概率分布的未知参数的常用算法是极大似然估计, 极大似然估计是通过极大化观测数据的对数概率(似然)实现的
DDPM(Denoising Diffusion Probabilistic Models)
$\text{Maximize E}_{q(x_1:x_T|x_0)}[log\left(\frac{P(x_0;x_T)}{q(x_1:x_T|x_0)}\right)]$
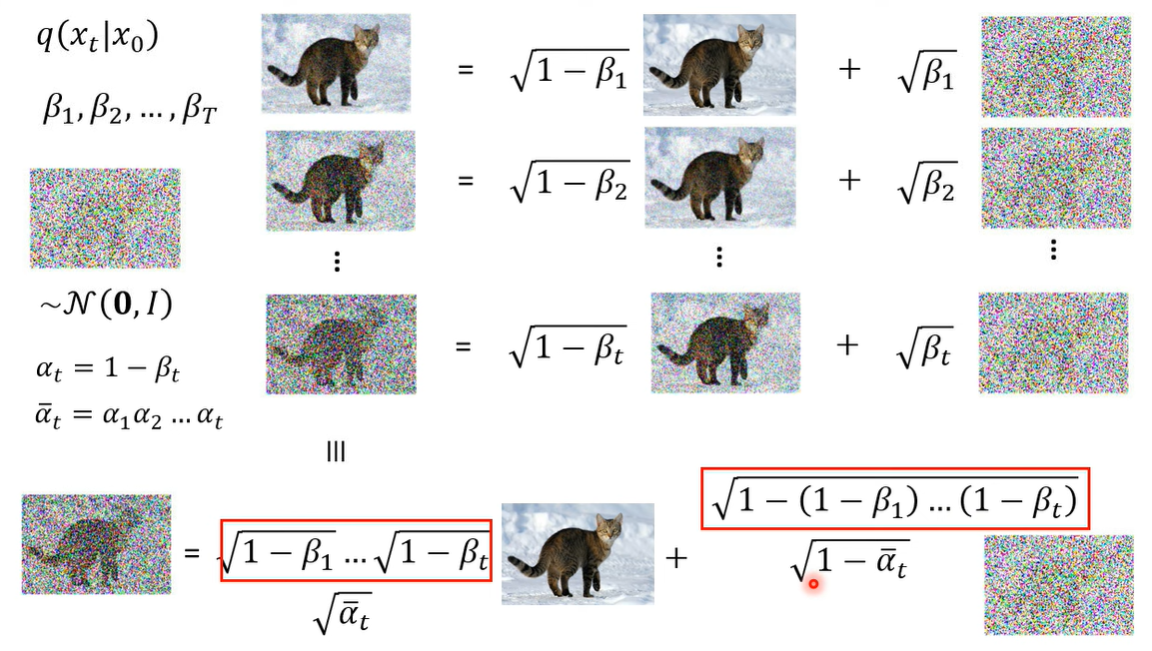
$q(x_t|x_0)$ 可以只做一次 sample(给定一系列 $\beta$)
DDPM 的 Lower bound of $logP(x)$
复杂公式推导得到: ELBO函数来约束网络训练
$logP(x) \geq \operatorname{E}_{q(x_1|x_0)}[logP(x_0|x_1)]-KL\big(q(x_T|x_0)||P(x_T)\big)-\sum_{t=2}^{T}\mathrm{E}_{q(x_{t}|x_{0})}\bigl[KL\bigl(q(x_{t-1}|x_{t},x_{0})||P(x_{t-1}|x_{t})\bigr)\bigr]$
- $\mathbb{E}_{q(x_{1}|x_0)}\left[\ln p_{\theta}(x_0|x_1)\right]$ 重建项,从隐式变量中重建出原来的数据$x_{0}$
- $\mathbb{E}_{q(x_{T-1}|x_0)}\left[D_{KL}{q(x_T|x_{T-1})}{p(x_T)}\right]$ 最后一个数据是高斯噪声,因此当T足够大,这一项趋于0
- $\mathbb{E}_{q(x_{t-1}, x_{t+1}|x_0)}\left[D_{KL}{q(x_{t}|x_{t-1})}{p_(x_{t}|x_{t+1})}\right]$ KL散度度量, consistency term。这一项用来最小化$q(x_{t}|x_{t-1})$ 与 $p_(x_{t}|x_{t+1})$ 之间的差异。期望是关于两个变量的,用采样法(MCMC)同时对两个随机变量进行采样,会导致更大的方差,这会使得优化过程不稳定,不容易收敛,可以将$p_(x_{t}|x_{t+1})$优化为:$q(x_{t-1}|x_t, x_0)$
$q(x_t | x_{t-1}, x_0) = \frac{q(x_{t-1} \mid x_t, x_0)q(x_t \mid x_0)}{q(x_{t-1} \mid x_0)}$
条件独立性:假设有三个随机变量A,B,C,三者依赖关系:A—>B—>C,当B值已知时,A和C相互独立,此时$P(C|B)=P(C|B,A)$ 成立 $q(x_t | x_{t-1}) = q(x_t | x_{t-1}, x_0)$
联合概率的基本性质:$q(x_t, x_{t-1}, x_0) = q(x_t \mid x_{t-1}, x_0) q(x_{t-1} \mid x_0) q(x_0)$ 另一种形式$q(x_t, x_{t-1}, x_0) = q(x_{t-1} \mid x_t, x_0) q(x_t \mid x_0) q(x_0)$
$q(x_t \mid x_{t-1}, x_0) q(x_{t-1} \mid x_0) q(x_0) = q(x_{t-1} \mid x_t, x_0) q(x_t \mid x_0) q(x_0)$
即得$q(x_t | x_{t-1}, x_0) = \frac{q(x_{t-1} \mid x_t, x_0)q(x_t \mid x_0)}{q(x_{t-1} \mid x_0)}$ 和 $q(x_{t-1}|x_{t},x_{0}) =\frac{q(x_{t}|x_{t-1})q(x_{t-1}|x_{0})}{q(x_{t}|x_{0})}$
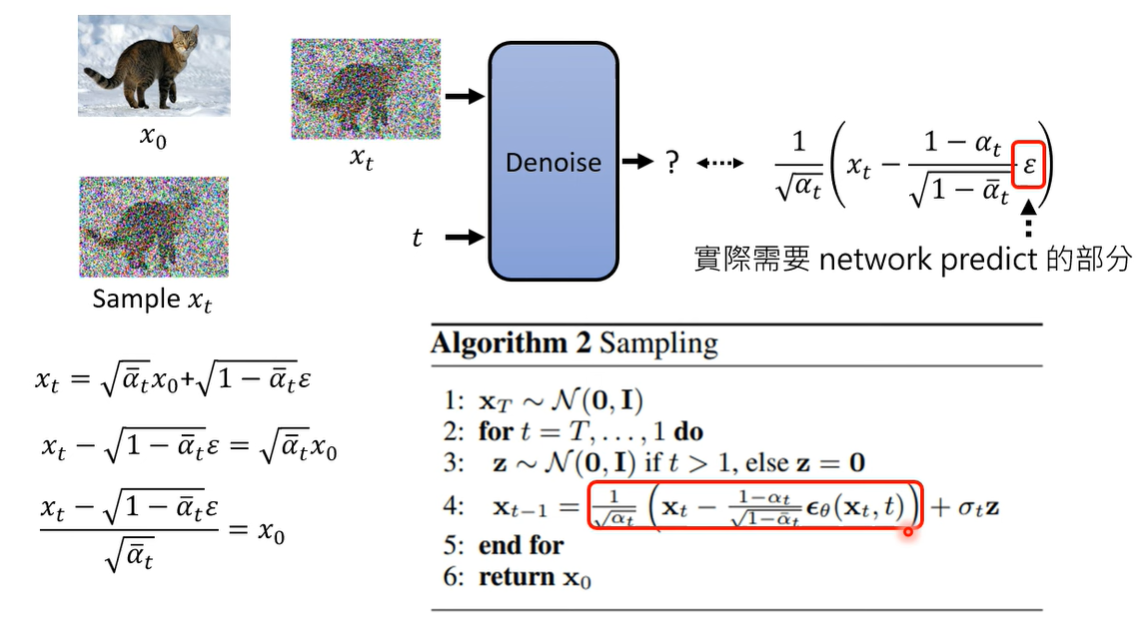
直接预测原始样本 $x_t=\sqrt{\bar{\alpha}_t}x_0+\sqrt{1-\bar{\alpha}_t}\epsilon.$
- $q(x_{t-1}|x_{t},x_{0}) =\frac{q(x_{t}|x_{t-1})q(x_{t-1}|x_{0})}{q(x_{t}|x_{0})}$ 为一个 Gaussian distribution 推导过程
- 均值+方差: $mean = \frac{\sqrt{\bar{\alpha}_{t-1}}\beta_{t}x_{0}+\sqrt{\alpha_{t}}(1-\bar{\alpha}_{t-1})x_{t}}{1-\bar{\alpha}_{t}}$ ,$variance = \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}}\beta$
$x_0$需要通过网络预测来获得,因此:
$\mu_q(x_t, x_0) = { \frac{\sqrt{\alpha_t}(1-\bar\alpha_{t-1})x_{t} + \sqrt{\bar\alpha_{t-1}}(1-\alpha_t)x_0}{1 -\bar\alpha_{t}}}$
$\mu_{\theta}={\mu}_(x_t, t) = \frac{\sqrt{\alpha_t}(1-\bar\alpha_{t-1})x_{t} + \sqrt{\bar\alpha_{t-1}}(1-\alpha_t)\hat x_(x_t, t)}{1 -\bar\alpha_{t}}$ 网络预测$\hat{x}_{\theta}$ ,然后这个分布,采样得到$x_{t-1}$
然而直接预测$x_{0}$时非常困难得,每个步骤都只给定每一步的t来预测同样的输出,(trained)相同的网络参数很难完成这样的预测
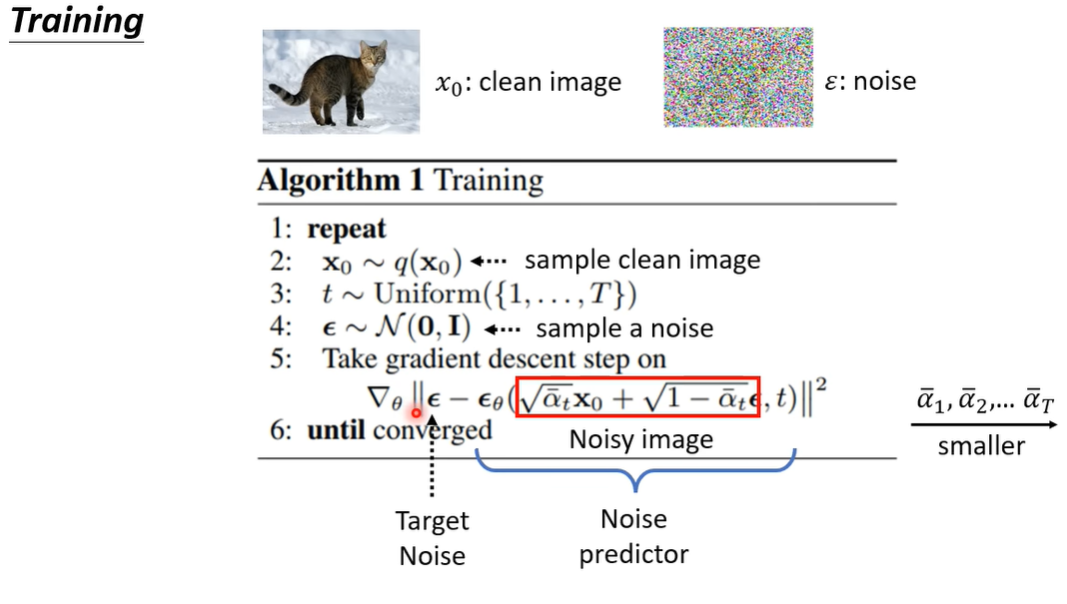
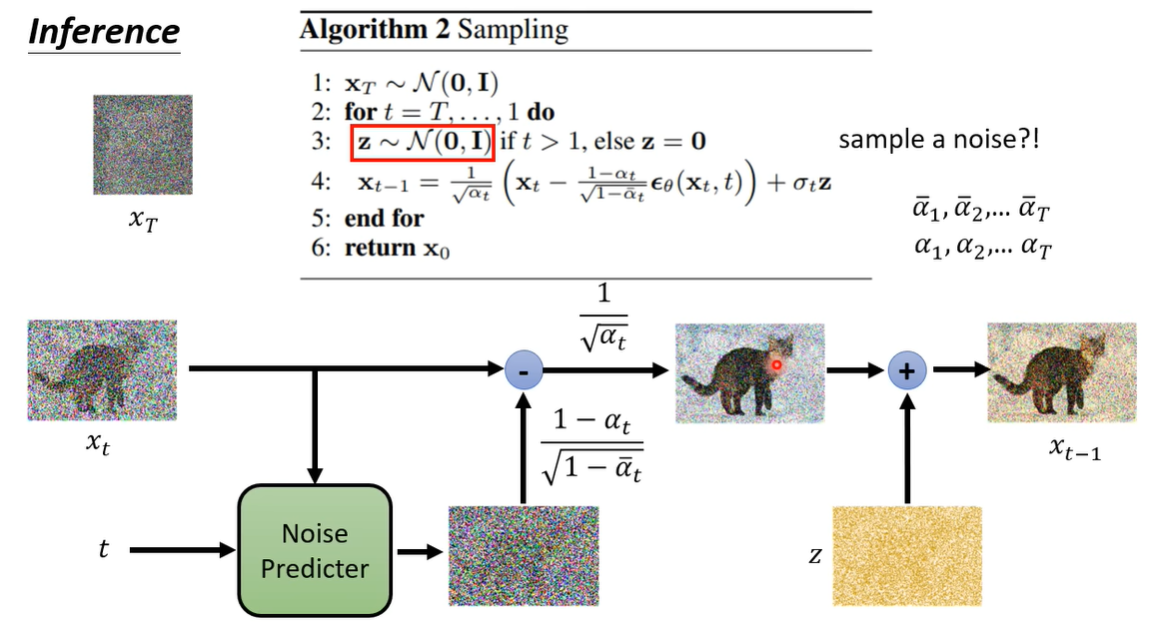
因此DDPM转换思路来预测每步t中添加的噪声:
$x_0 = \frac{x_t -\sqrt{1- \bar{ \alpha}_t } \ \epsilon_t }{ \sqrt{\bar{\alpha}_t } },\ \ \epsilon_t \sim \mathcal{N}(0,\textit{I})$
均值:$\mu_{\theta}={\mu}_(x_t, t) = \frac{1}{\sqrt{\alpha_t}}x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar\alpha_t}\sqrt{\alpha_t}} {\hat\epsilon}_{ {\theta}}(x_t, t)$ 推导过程 (将$x_{0}$重写成$\epsilon$)
DDPM 三种形式
逆向生成过程:$q(x_{t-1}|x_t,x_0) \sim \mathcal{N}(x_{t-1},\mu_q,\Sigma_{q(t)})$
方差:
$\Sigma_q(t) = \frac{(1 - \alpha_t)(1 - \bar\alpha_{t-1})}{ 1 -\bar\alpha_{t}} \textit{I} = \sigma_q^2(t) \textit{I}$
1)直接预测初始样本
$\mu_q(x_t, x_0) = { \frac{\sqrt{\alpha_t}(1-\bar\alpha_{t-1})x_{t} + \sqrt{\bar\alpha_{t-1}}(1-\alpha_t)x_0}{1 -\bar\alpha_{t}}}$
$\mu_{\theta}={\mu}_(x_t, t) = \frac{\sqrt{\alpha_t}(1-\bar\alpha_{t-1})x_{t} + \sqrt{\bar\alpha_{t-1}}(1-\alpha_t)\hat x_(x_t, t)}{1 -\bar\alpha_{t}}$
2)预测噪声
$\mu_q(x_t, x_0) = \frac{1}{\sqrt{\alpha_t}}x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar\alpha_t}\sqrt{\alpha_t}}\ \epsilon$
$\mu_{\theta}={\mu}_(x_t, t) = \frac{1}{\sqrt{\alpha_t}}x_t - \frac{1 - \alpha_t}{\sqrt{1 - \bar\alpha_t}\sqrt{\alpha_t}} {\hat\epsilon}_{ {\theta}}(x_t, t)$
3)预测分数
${\mu}_q(x_t, x_0) = \frac{1}{\sqrt{\alpha_t}}x_t + \frac{1 - \alpha_t}{\sqrt{\alpha_t}}\nabla\log p(x_t)$
${\mu}_q(x_t, x_0) = \frac{1}{\sqrt{\alpha_t}}x_t + \frac{1 - \alpha_t}{\sqrt{\alpha_t}} s_{\theta}(x_t,t)$
DDPM Code
Schedule
betas: $\beta_t$ ,betas=torch.linspace(1e-4,2e-2,num_timesteps)alphas: $\alpha_t=1-\beta_t$alphas_sqrt: $\sqrt{\alpha_t}$alphas_prod: $\bar{\alpha}_t=\prod_{i=0}^{t}\alpha_i$alphas_prod_sqrt: $\sqrt{\bar{\alpha}_t}$
diffusion step 0,1,…,t,…T:随着t增大,beta应该逐渐增大
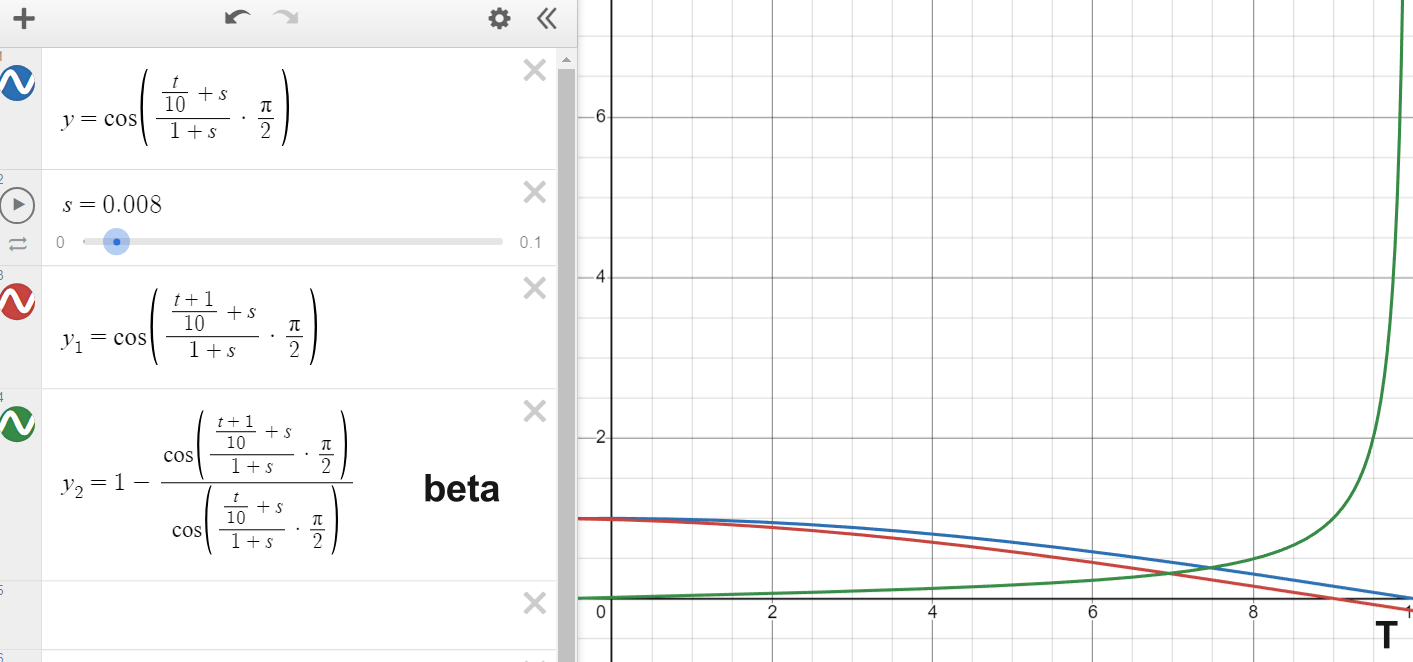
- cosine:
- $\alpha_{cumprod} =\cos\left( \left( \frac{\frac{t}{T}+s}{(1+s)}\cdot \pi \cdot 0.5 \right)^{2} \right)$ ,value: $\cos\left( \frac{s}{1+s} \cdot \frac{\pi}{2} \right)$ ~$\cos\left( \frac{\pi}{2} \right)$ = $\cos(0)$ ~ $\cos\left( \frac{\pi}{2} \right)$ if s —> 0
- $\alpha_{cumprod} = \frac{\alpha_{cumprod}}{\alpha_{cumprod}^{max}}$, 让最大的$\alpha$不超过1
- $\beta$ =
1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
- linear:
- $linspace\left( scale0.0001,scale0.02,T \right)$ , $scale=\frac{1000}{T}$
1 | # consine beta |
Forward Process
Forward step:
Forward jump:
1 | def forward_step(t, condition_img, return_noise=False): |
Reverse Process
至少三种逆向过程的求法,从 $x_{t}$ 到 $x_{0}$
There are at least 3 ways of parameterizing the mean of the reverse step distribution $p_\theta(x_{t-1}|x_t)$:
- Directly (a neural network will estimate $\mu_\theta$)直接用网络预测 $\mu_\theta$
- Via $x_0$ (a neural network will estimate $x_0$)用网络预测 $x_0$
- Via noise $\epsilon$ subtraction from $x_0$ (a neural network will estimate $\epsilon$)用网络预测噪声 $\epsilon$
Why Does Diffusion Work Better than Auto-Regression?
Why Does Diffusion Work Better than Auto-Regression? - YouTube
- 分类任务:图片—>类别
如何生成图片(Thinking):
- 从任意数据中预测整张图片(真实图片做标签),这样训练集标签图片的mean value会变blurring(blurry mess)。(分类任务中训练集标签01的meaning value不会收到很大影响)
- Auto-Regressor: 正向过程是不断擦除图像,网络被训练为undo这个过程,即不断预测图片的下一个像素是什么颜色(like ChatGPT)
- 考虑来预测图片中的单个像素,这样训练集标签的mean value是另一个颜色值(网络根据输入的图片来预测单个颜色值)。每个像素的颜色训练一个网络来进行预测,通过多个网络,依次预测每个像素值,最终得到整张图片。这样就能生成plausible(似乎是真的) image,out of nothing(凭空)。然而每次生成的图片是相同的
- 考虑添加随机,之前predicted pixel是概率分布中概率最大的那个颜色值,不去这样选择而是随机选择某个概率的颜色作为本次的预测
- 缺点是随着像素量的增大,计算量非常大,要生成一张大像素图像是非常耗时的。当然可以造数据集时一次remove多个像素,在训练中一次预测多个像素。但是不能过多,这样依然会造成blurry mess Trade-off:更快但是blurry mess,更慢但是更准确
Blurry mess: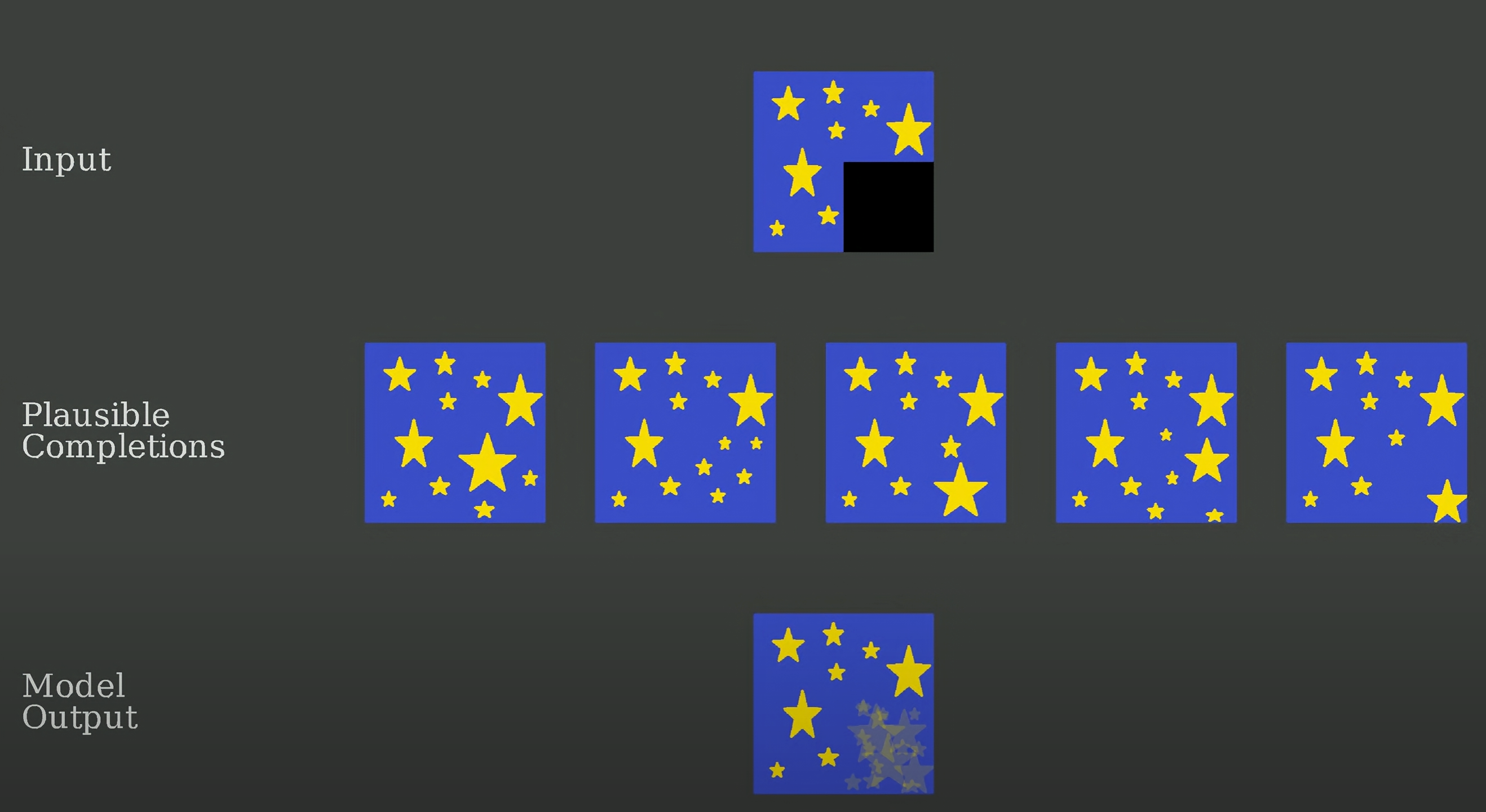
Why predicting one pixel is work: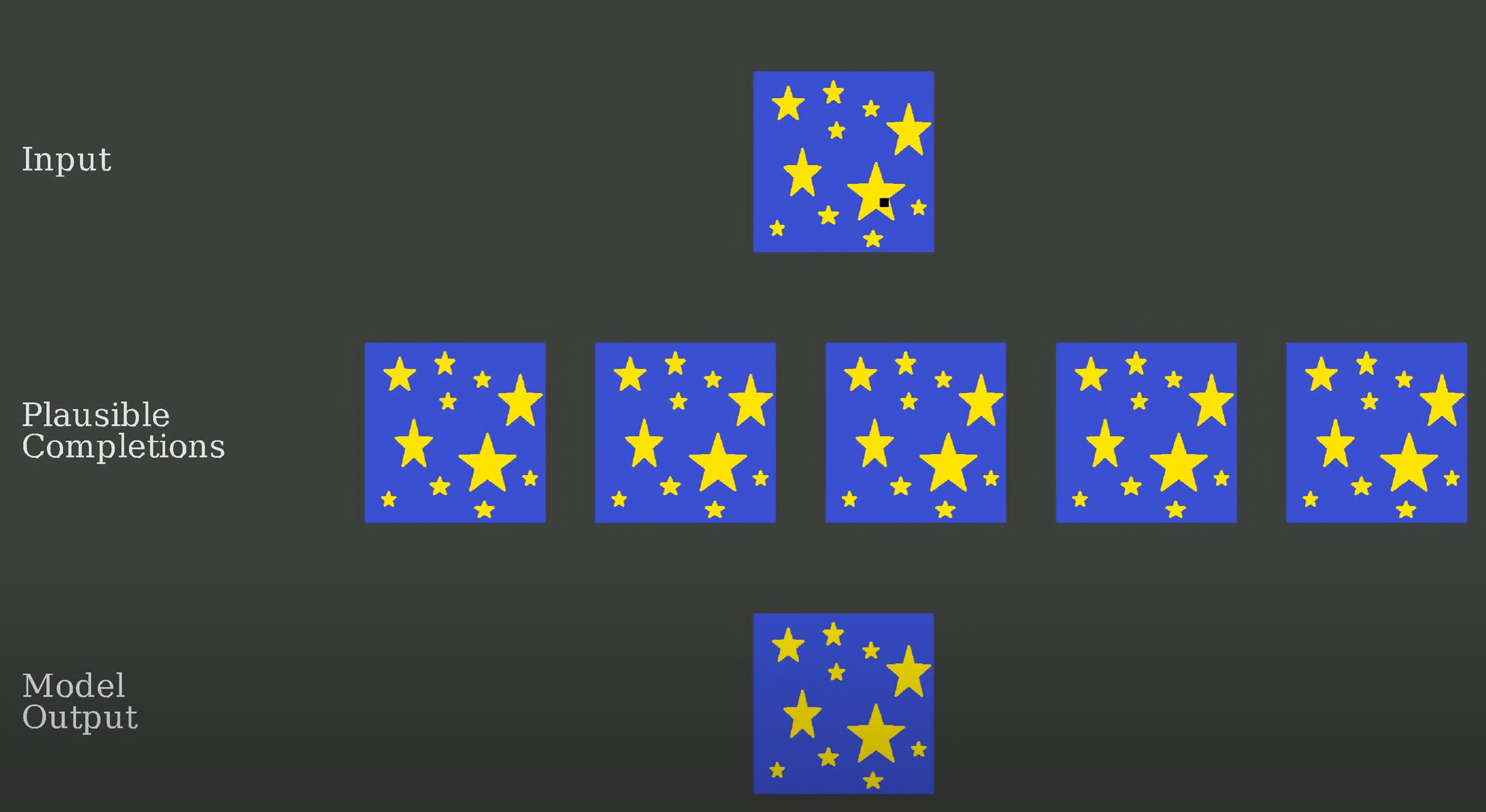
该问题只会出现在预测的值是互相关的情况(在图像中相近的像素通常是强相关的,这在按顺序remove时出现),假设预测的值相互独立的情况(随机remove像素)。remove像素可以从另一种角度进行实现,即给每个像素添加噪声
Stable Diffusion
目前常见的 UI 有 WebUI 和 ComfyUI
模型
模型格式:
- 主模型 checkpoints:ckpt, safetensors
- 微调模型
- LoRA 和 LyCORIS 控制画风和角色:safetensors
- 文本编码器模型:pt,safetensors
- Embedding 输入文本 prompt 进行编码 pt
- Hypernetworks 低配版的 lora pt
- ControlNet
- VAE 图片与潜在空间 pt
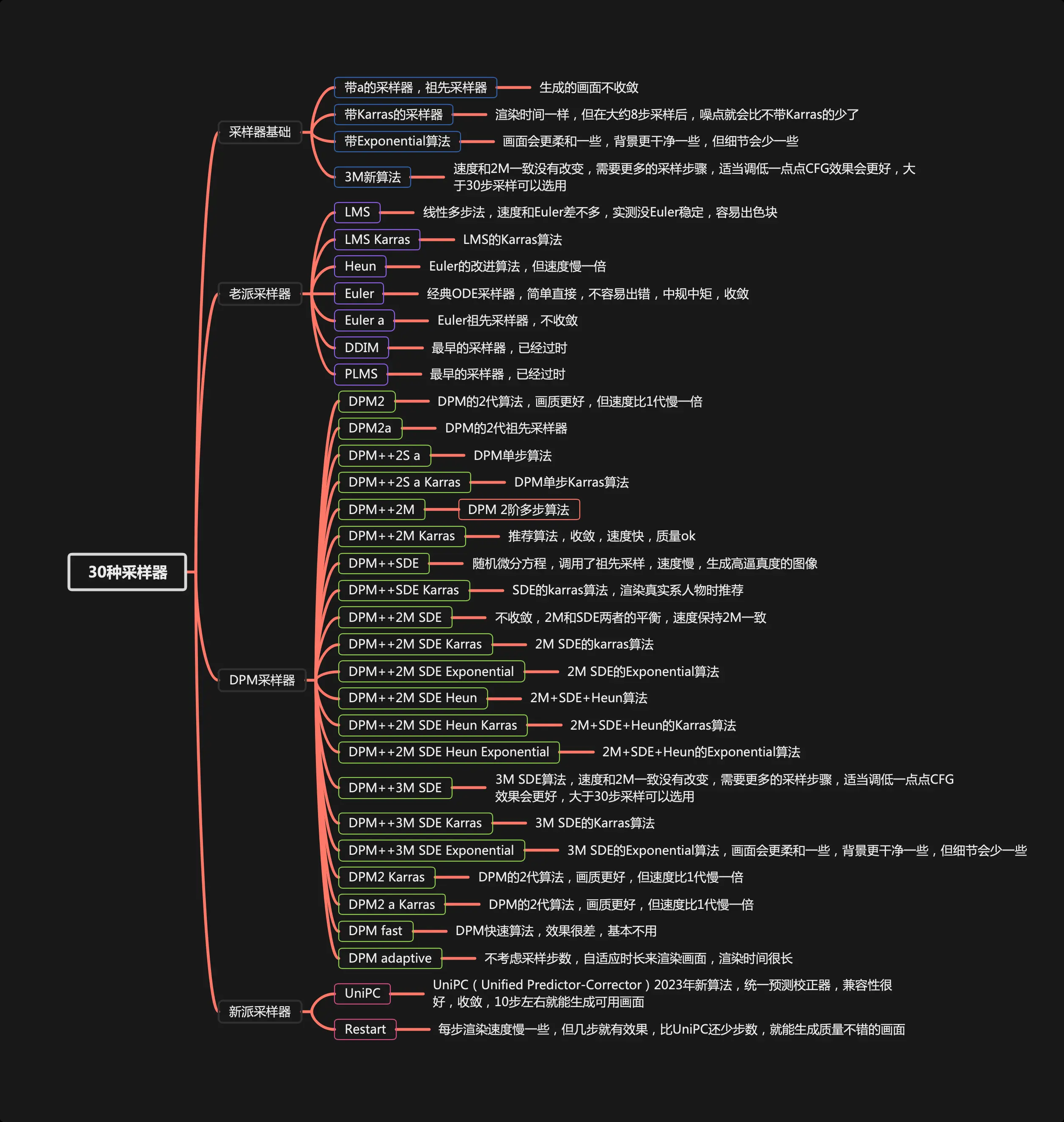
采样器
Stable diffusion采样器全解析,30种采样算法教程
DPM++2M Karras,收敛+速度快+质量 OK