Loss Functions and Metrics in Deep Learning 这篇Review中提到的loss函数比较全面
Loss Functions vs. Performance Metrics
损失函数在训练过程中用于优化模型参数。它衡量的是模型预测输出与预期输出之间的差值,而训练的目标就是尽量减小这一差值。(可微)
性能指标用于评估训练后的模型。它衡量的是模型对新数据的泛化程度以及预测的准确性。性能指标还可以对不同的模型或配置进行比较,以确定性能最佳的模型或配置。(不需要可微)
常用的loss
L1 Loss(MAE, Mean Absolute Error)
- $y_i$为真实值
- $\hat{y_{i}}$为预测值
L2 Loss(MSE, Mean Squared Error)
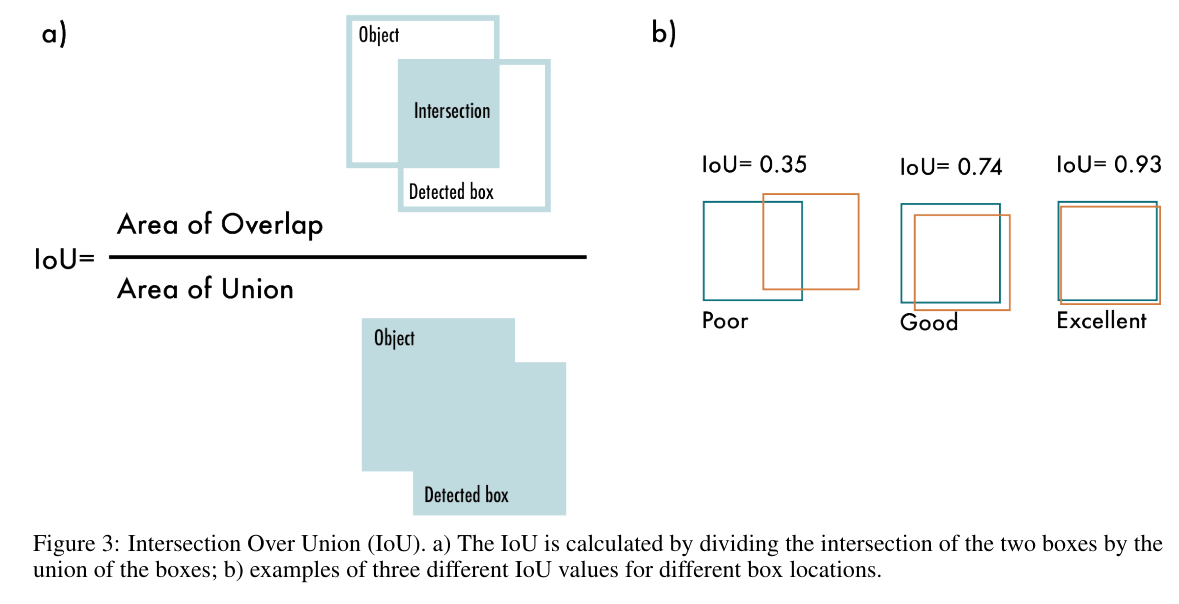
交并比损失(IoU, Intersection over Union)
交叉熵损失(Cross Entropy Loss)
二分类(BCE, Binary Cross-Entropy Loss)
- $y_i$表示样本$i$的label,正类为1,负类为0
- $p_i$样本$i$预测为正类的概率
多分类(CCE, Categorical Cross-entropy Loss)
Time series Loss
FFT Loss
(Fast fourier transform and convolution algorithms)
DIFFUSION-TS: INTERPRETABLE DIFFUSION FOR GENERAL TIME SERIES GENERATION
1 | # target: batch_size, seq_length, feature_dim |
三维重建 Loss Functions
Eikonal loss
确保SDF在空间中的梯度大小保持恒定,这有助于保持SDF场的一致性和准确性
RGB Loss
L2 损失:F.mse_loss(pred_rgb, gt_rgb) $L=\sum_{i=1}^n(y_i-f(x_i))^2$
L1 损失:F.l1_loss(pred_rgb, gt_rgb)更稳定? $L=\sum_{i=1}^n|y_i-f(x_i)|$
Mask Loss
$\mathcal{L}_{mask}=\mathrm{BCE}(M_k,\hat{O}_k)$
- $\hat{O}_k=\sum_{i=1}^n T_{k,i}\alpha_{k,i}$
- $M_{k} ∈ {0, 1}$
BCE 二值交叉熵损失:让输出$\hat{O}_k$去逼近 label $M_{k}$
Spatial-BCE
一种新的 BCE lossECCV’22 | Spatial-BCE - 知乎 (zhihu.com)
Opacity Loss
loss_opaque = -(opacity * torch.log(opacity) + (1 - opacity) * torch.log(1 - opacity)).mean()
$opaque = BCE(opaque,opaque) = -[opaque ln(opaque) + (1-opaque) ln(1-opaque)]$
使得 opacity 更加接近 0 或者 1
Sparsity Loss
loss_sparsity = torch.exp(-self.conf.loss.sparsity_scale * out['sdf_samples'].abs()).mean()
$sparsity = \frac{1}{N} \sum e^{-scale * sdf}$
让 sdf 的平均值更小,前景物体更加稀疏,物体内的点往外发散
Geo-Neus
- sdf loss
sdf_loss = F.l1_loss(pts2sdf, torch.zeros_like(pts2sdf), reduction='sum') / pts2sdf.shape[0]- $\mathcal{L}_{sdf} = \frac{1}{N} \sum |sdf(spoint) - 0|$
Other loss
加强Eikonal对SDF的优化
sunyx523/StEik (github.com)
NeurIPS 2023 | 三维重建中的Neural SDF(Neural Implicit Surface) - 知乎 (zhihu.com)
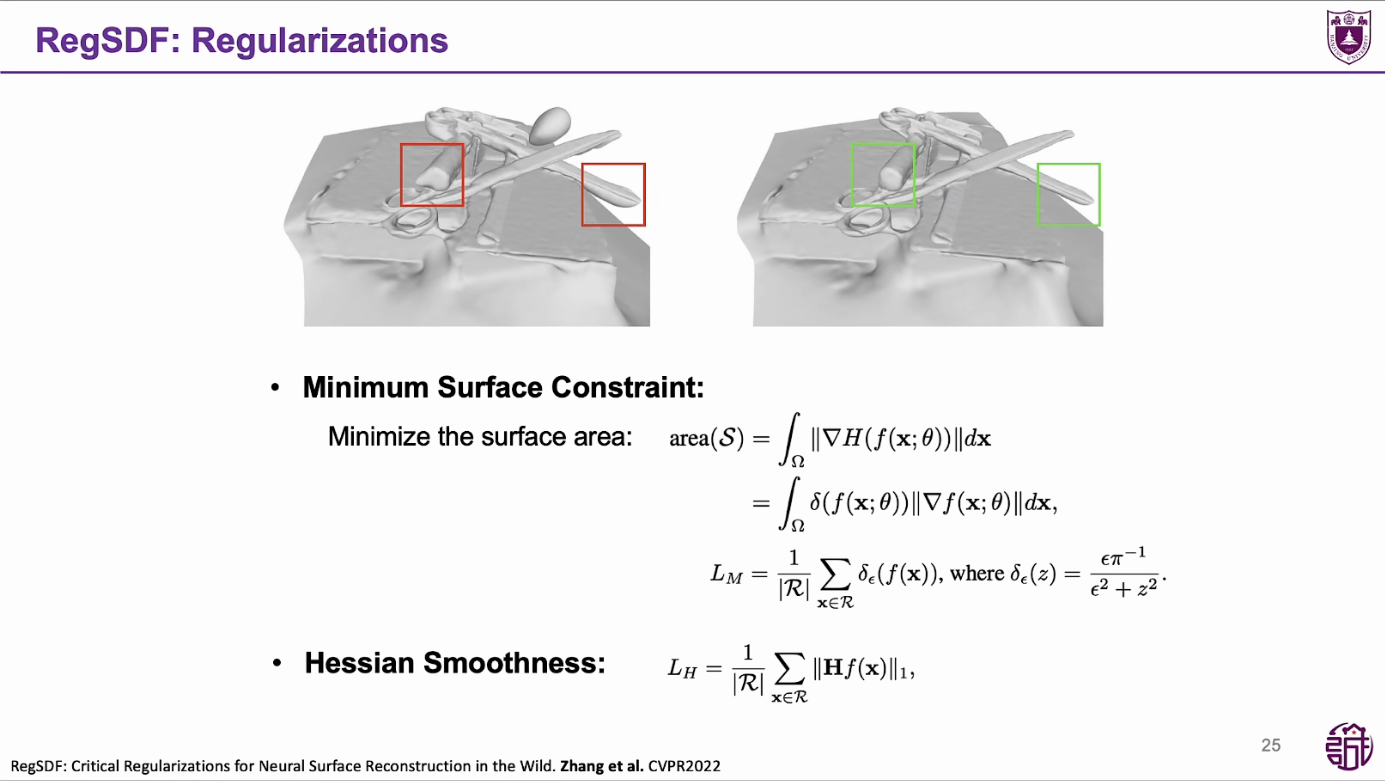
一个好的SDF其实只需要其法线方向上的二阶导数为0,如果在切线方向上的二阶导数为0的话,得到的SDF轮廓会非常平滑,不利于学习到一些细节。
$L_\text{L. n.}(u)=\int_{\Omega}|\nabla u(x)^TD^2u(x)\cdot\nabla u(x)|dx.$
随机结构相似性损失(S3IM, Stochastic Structural SIMilarity loss)
Project Page S3IM Stochastic Structural SIMilarity and Its Unreasonable Effectiveness for Neural Fields
Paper S3IM: Stochastic Structural SIMilarity and Its Unreasonable Effectiveness for Neural Fields
Smoothness Loss
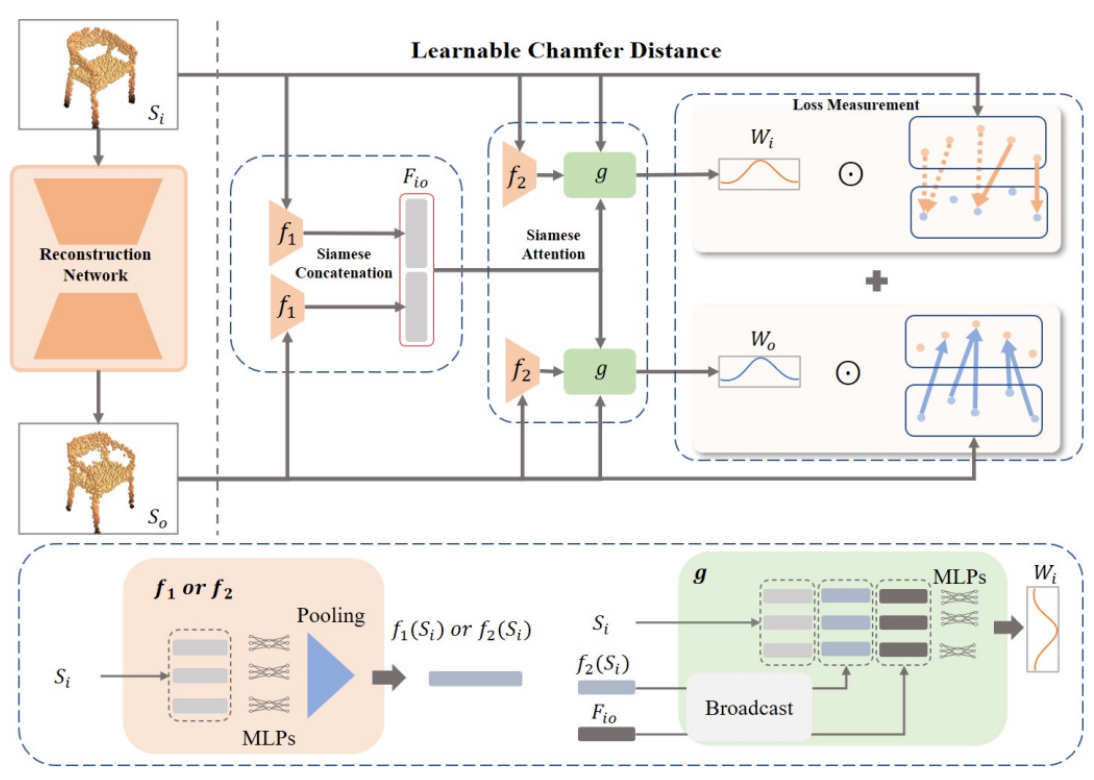
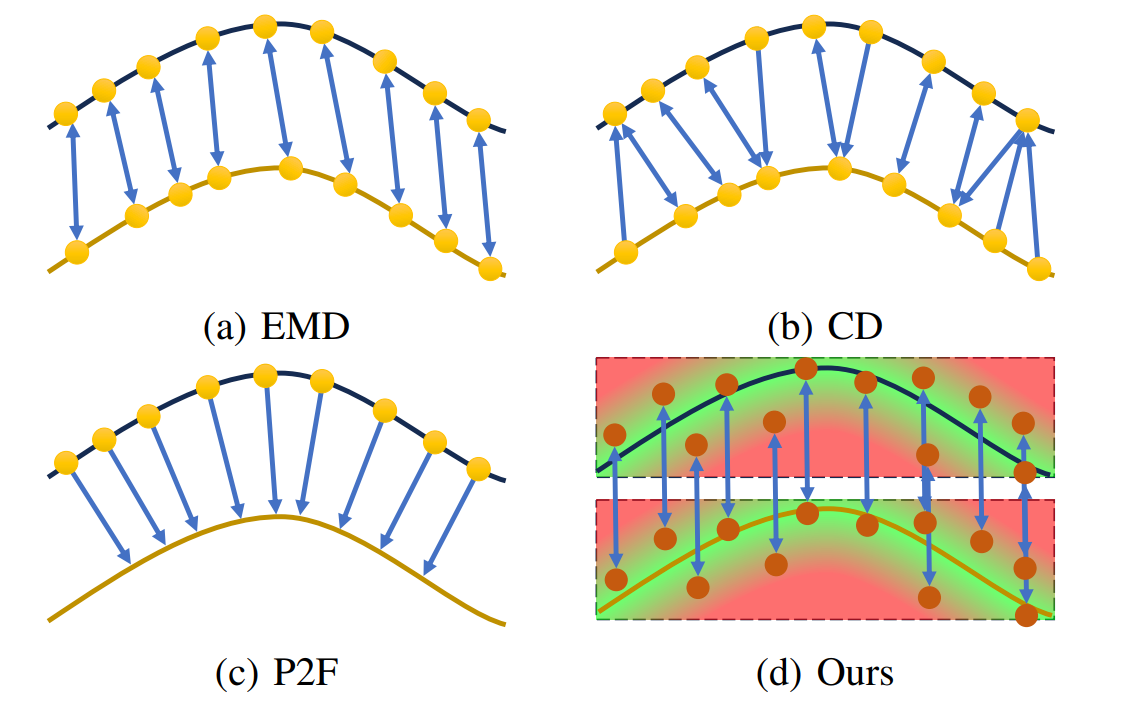
可学习倒角距离(LCN, Learnable Chamfer Distance)
我们提出了一种简单但有效的重建损失,称为可学习倒角距离(LCD),通过动态关注由一组可学习网络控制的不同权重分布的匹配距离
DirDist
三维重建 Performance Metrics
倒角距离(CD↓, Chamfer Distance)
jzhangbs/DTUeval-python: A fast python implementation of DTU MVS 2014 evaluation (github.com)
点云或 mesh 重建模型评估指标,它度量两个点集之间的距离,其中一个点集是参考点集,另一个点集是待评估点集
- $S_{1}$ 和 $S_{2}$ 分别表示两组 3D 点云,第一项代表 $S_{1}$ 中任意一点 x 到 $S_{2}$ 的最小距离之和,第二项则表示 $S_{2}$ 中任意一点 y 到 $S_{1}$ 的最小距离之和。
如果该距离较大,则说明两组点云区别较大;如果距离较小,则说明重建效果较好。
$\begin{aligned}\mathcal{L}_{CD}&=\sum_{y’\in Y’}min_{y\in Y}||y’-y||_2^2+\sum_{y\in Y}min_{y’\in Y’}||y-y’||_2^2,\end{aligned}$
PSNR↑
峰值信噪比 Peak Signal to Noise Ratio
PSNR 是一个无参考的质量评估指标
$PSNR(I)=10\cdot\log_{10}(\dfrac{MAX(I)^2}{MSE(I)})$
$MSE=\frac1{mn}\sum_{i=0}^{m-1}\sum_{j=0}^{n-1}[I(i,j)-K(i,j)]^2$
$MAX(I)^{2}$(动态范围可能的最大像素值,b 位:$2^{b}-1$),eg: 8 位图像则$MAX(I)^{2} = 255$
1 | # Neus |
SSIM↑
VainF/pytorch-msssim: Fast and differentiable MS-SSIM and SSIM for pytorch. (github.com)
结构相似性 Structural Similarity Index Measure
SSIM 是一个完整的参考质量评估指标。
$SSIM(x,y)=\dfrac{(2\mu_x\mu_y+C_1)(2\sigma_{xy}+C_2)}{(\mu_x^2+\mu_y^2+C_1)(\sigma_x^2+\sigma_y^2+C_2)}$
衡量了两张图片之间相似度:($C_1,C_2$为常数防止除以 0)
$S(x,y)=l(x,y)^{\alpha}\cdot c(x,y)^{\beta}\cdot s(x,y)^{\gamma}$
$C_1=(K_1L)^2,C_2=(K_2L)^2,C_3=C_2/2$
$K_{1}= 0.01 , K_{2} = 0.03 , L = 2^{b}-1$
- 亮度,图像 x 与图像 y 亮度 $l(x,y) =\frac{2\mu_x\mu_y+C_1}{\mu_x^2+\mu_y^2+C_1}$
- $\mu_{x} =\frac1N\sum_{i=1}^Nx_i$像素均值
- $x_i$像素值,N 总像素数
- 当 x 与 y 相同时,$l(x,y) = 1$
- $\mu_{x} =\frac1N\sum_{i=1}^Nx_i$像素均值
- 对比度,$c(x,y)=\frac{2\sigma_x\sigma_y+C_2}{\sigma_x^2+\sigma_y^2+C_2}$
- 图像标准差$\sigma_x=(\frac1{N-1}\sum_{i=1}^N(x_i-\mu_x)^2)^{\frac12}$
- 结构对比,$s(x,y)=\frac{\sigma_{xy}+C_3}{\sigma_x\sigma_y+C_3}$ - 图像的协方差$\sigma_{xy}=\frac1{N-1}\sum_{i=1}^N(x_i-\mu_x)(y_i-\mu_y)$
实际使用中(圆对称高斯加权公式),使用一个高斯核对局部像素求 SSIM,最后对所有的局部 SSIM 求平均得到 MSSIM
使用高斯核,均值、标准差和协方差变为:
$\mu_{x}=\sum_{i}w_{i}x_{i}$
$\sigma_{x}=(\sum_{i}w_{i}(x_{i}-\mu_{x})^{2})^{1/2}$
$\sigma_{xy}=\sum_{i}w_{i}(x_{i}-\mu_{x})(y_{i}-\mu_{y})$
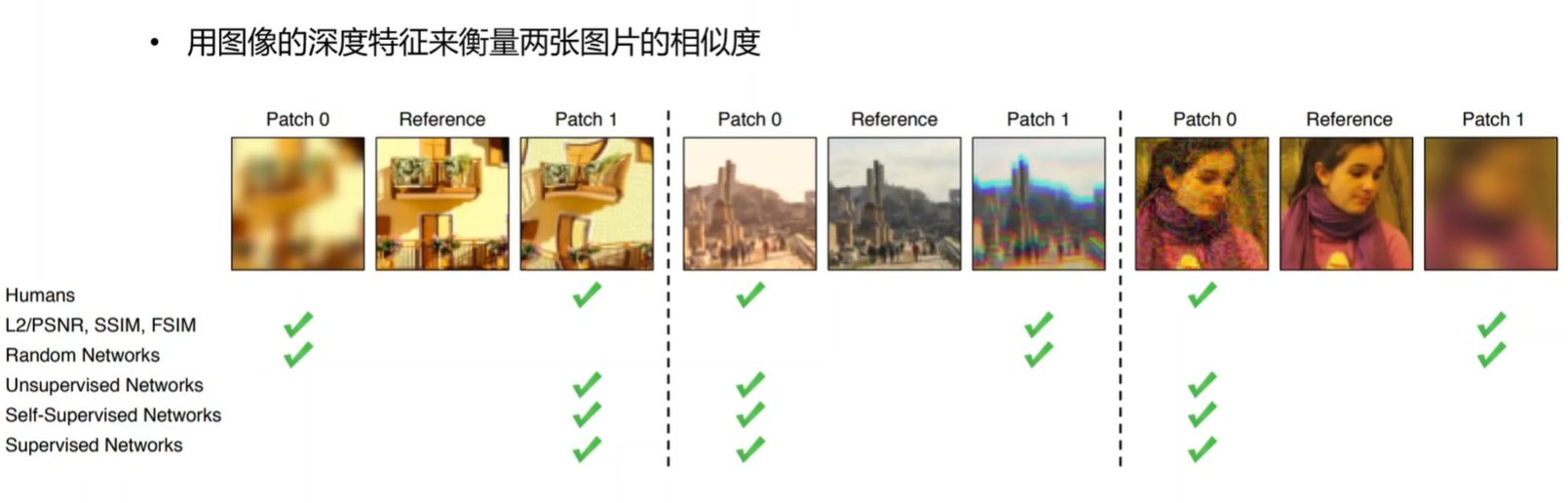
学习感知图像块相似度(LPIPS↓, Learned Perceptual Image Patch Similarity)
The Unreasonable Effectiveness of Deep Features as a Perceptual Metric
LPIPS 比传统方法(比如 L2/PSNR, SSIM, FSIM)更符合人类的感知情况。LPIPS 的值越低表示两张图像越相似,反之,则差异越大。。LPIPS 是一个完整的参考质量评估指标,它使用了学习的卷积特征。分数是由多层特征映射的加权像素级 MSE 给出的。
平均点到面距离(P2S↓, average point-to-surface distance)
P2S距离: 是CD的单向版本。(CAPE数据集scan包含大的空洞,为了排除孔洞影响,ICON论文记录scan点到最近重构表面点之间距离)
Normal↓
average surface normal error平均表面法向损失
Normal difference: 表示使用重构的及真值surface分别进行渲染normal图片,计算两者之间L2距离,用于捕获高频几何细节误差。
For both reconstructed and ground truth surfaces, we render their normal maps in the image space from the input viewpoint respectively. We then calculate the L2 error between these two normal maps.
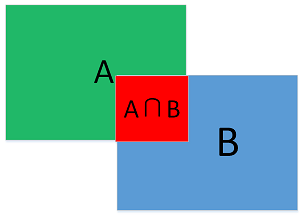
IoU↑
Intersection over Union(IoU)交并比
在目标检测中用到的指标$IOU = \frac{A \cap B}{A \cup B}$
一般来说,这个比值 > 0.5 就可以认为是一个不错的结果了。
- A: GT bounding box
- B: Predicted bounding box
推土距离(EMD↓, Earth Mover’s distance)
[2102.12833] Diffusion Earth Mover’s Distance and Distribution Embeddings
EMD(earth mover’s distances)距离 - 知乎 (zhihu.com)
Earth Mover’s Distance (EMD) loss · Issue #211 · facebookresearch/pytorch3d
EMD指标可以用来评价结果,但是无法用作损失loss,已有的loss_ED无法用于中型规模以上的点云中
度量两个分布之间的距离,$\phi$ indicates a parameter of bijection.
$\mathcal{L}_{EMD}=min_{\phi:Y\rightarrow Y^{\prime}}\sum_{x\in Y}||x-\phi(x)||_{2}$ , φ indicates a parameter of bijection.
Accuracy、Precision、Recall & F-score
如何解释召回率与精确率? - 朝暾的回答 - 知乎
机器学习的评价指标(一):Accuracy、Precision、Recall、F1 Score - 知乎 (zhihu.com)
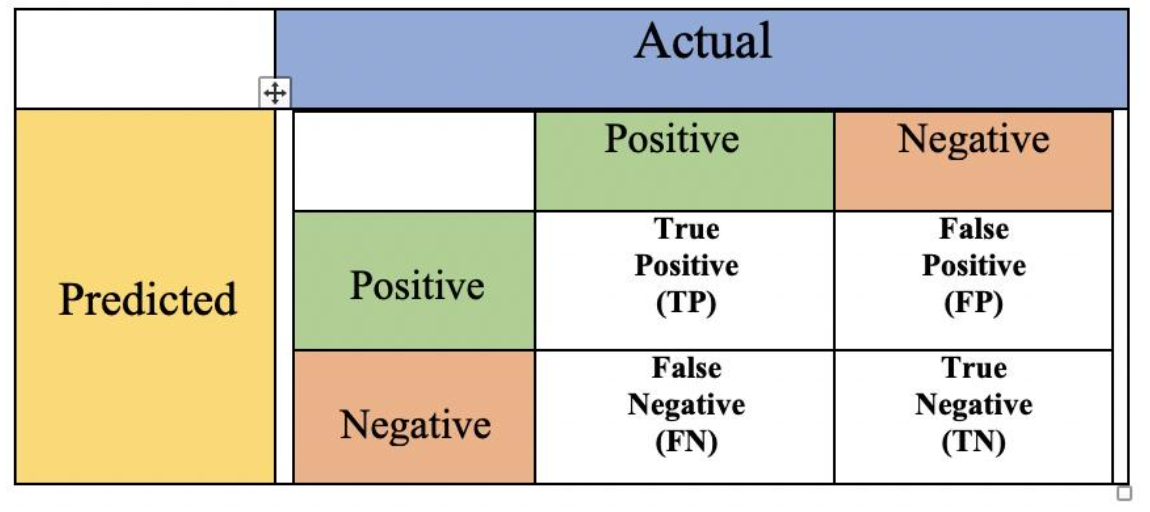
Accuracy
预测正确的样本数÷样本数总数
$accuracy=\frac{TP+TN}{TP+TN+FP+FN}$
Precision
精确率是针对我们预测结果而言的,它表示的是预测为正的样本中有多少是真正的正样本。
$precision=\frac{TP}{TP+FP}$
Recall
召回率是针对我们原来的样本而言的,它表示的是原来样本中的正例有多少被预测正确了,也即 真实准确的正预测在原来样本的正例中所占的百分比。
$recall=sensitivity=\frac{TP}{TP+FN}$
F-score
F-Measure是Precision和Recall的加权调和平均
$F=\frac{(a^2+1)precisionrecall}{a^2*precision+recall}$
当参数α=1时,就是最常见的F1,也即$F1=\frac{2precisionrecall}{precision+recall}$
不确定性
Negative Log Likelihood (NLL) ↓
$\mathrm{NLL}(S)=-\sum_{i=1}^{N}\operatorname{log}p(y_{i}|\mathbf{x}_{i};\theta).$
Deep Ensemble (DE)
$-\log p_\theta\left(y_n\mid\mathbf{x}_n\right)=\frac{\log\sigma_\theta^2(\mathbf{x})}{2}+\frac{\left(y-\mu_\theta(\mathbf{x})\right)^2}{2\sigma_\theta^2(\mathbf{x})}+\mathrm{C}$
Measuring predictive uncertainty with Negative Log Likelihood (NLL)? - Cross Validated
假设有数据集$\mathcal{D}=\{(t_n, {\bf x}_n)\vert t_n\in\mathbb{R}, \mathcal{x}_n\in\mathbb{R}^M\}_{n=1}^N$ ,和一个神经网络架构$f: \mathbb{R}^M\to\mathbb{R}$ ,数据集$t_{n}$服从正态分布:$t_n|\mathbf{x}_n\sim\mathcal{N}(t_n|f(\mathbf{x}_n,W),\sigma^2)$
通过K个不同网络,得到不同权重W,则可以通过比较它们的似然度或等价地,它们的负对数似然度,来寻找最佳的(就训练数据集而言)NN,因为这将告诉我们每个配置生成观察到的训练数据集的可能性有多大。
1 | from torch.distributions import Normal |
对于正态分布$p(x)=\frac{1}{\sqrt{2\pi\sigma^2}}\exp\left(-\frac{(x-\mu)^2}{2\sigma^2}\right)$的log_prob的公式为:$\log(p(x))=-\frac{1}{2}\log(2\pi)-\log(\sigma)-\frac{(x-\mu)^2}{2\sigma^2}$
NLL为对所有的log_prob求和并取负:$\mathrm{NLL}=-\sum_{i=1}^N\log(p(x_i))$
Area Under Sparsification Error (AUSE)↓
assess how well the predicted uncertainty coincides with the prediction error on a test datassets
$\mathrm{MAE}(S)=\frac{1}{|S|}\sum_{(\mathbf{x}_i,y_i)\in S}|y_i-F(\mathbf{x}_i;\theta)|.$ 真实值与网络F预测值之间的差异,xy分别是数据集的一对输入与输出
$\mathrm{AUSE}(S)=\frac{1}{\mathrm{MAE}(S)}\int_{0}^{1}\mathrm{MAE}(S_{\vee}^{U}(\alpha))-\mathrm{MAE}(S_{\vee}(\alpha))d\alpha.$ 评估预测的不确定性与预测误差之间的相关程度
Area Under Calibration Error (AUCE)↓
Uncertainty Quantification Metrics for Deep Regression
Evaluating Scalable Bayesian Deep Learning Methods for Robust Computer Vision
from the Expected Calibration Error (ECE) which is originally diagnostic tools for classification models that compare sample accuracy against predicted confidence.
predicted probability distribution of an input $x_{i}$ :$P_{\theta}^{i}=F(\mathbf{x}_{i};\theta)$
then the predicted cumulative distribution function for the $y_{i}$ : $P(y_i|\theta)=P_\theta^i(y\leq y_i|\theta).$
$\hat{p}_j=\frac{|\{y_i\mid P(y_i|\theta)\leq p_j,(\mathbf{x}_i,y_i)\in S\}|}{N}$ , 其中 $p_{j} \in [0,1]$ 表示 arbitrary threshold value,
Then the calibrated error : $\operatorname{cal}(\hat{p}_1,\cdots,\hat{p}_N)=\sum_{j=1}^Mw_j(p_j-\hat{p}_j)^2$,其中$w_{j}$是 arbitrary scaling weight $w_j=\frac{1}{N/\hat{p}_j}.$
AUCE construct prediction intervals for each pixel and check the proportion of pixels for which their interval covers their corresponding true target value
predicted interval $\mu\pm\Phi^{-1}(\frac{p+1}{2})\beta,$ 其中 $p \in (0,1)$ is confidence level $\Phi$ is the cumulative distribution function (CDF) of the standard Normal distribution, $\mu, \beta$ is the predicted mean and standard deviation respectively e.g., rendered RGB and its uncertainty.
The empirical coverage $\hat{p}$ of each confidence level $p$ 计算方法:构建一个预测区间 for every $(\mu_{i},\beta_{i})$ pair (根据不同的$p$?),然后计算有多少目标$y_{i}$落在这个区间。
理想情况下(perfectly calibrated model):$\hat{p}=p$
the metric is computed using the absolute error with respect to perfect calibration: $|\hat{p}-p|$